2. Visual Correspondence(2)
Dense Correspondence
모든 점들을 활용해 Pixel간의 매칭을 수행하는 것
ex. Flow예측
즉, 모든 점들을 활용해야 하기 때문에 Sparse Correspondence처럼 특별한 Feature Detection과정이 필요없다.
따라서 다음으로 구성할 수 있다.
- Feature Descriptor
- Regularization
- 모든 점들을 사용하는 만큼 Regularization방법이 중요해진다. 하지만 Noise가 많아지기 때문에 Regularization방법이 중요해진다.
- Regularization
(before: Sparse Correspondence: 특정 점들을 사용해 이미지간의 매칭을 수행하는 것)
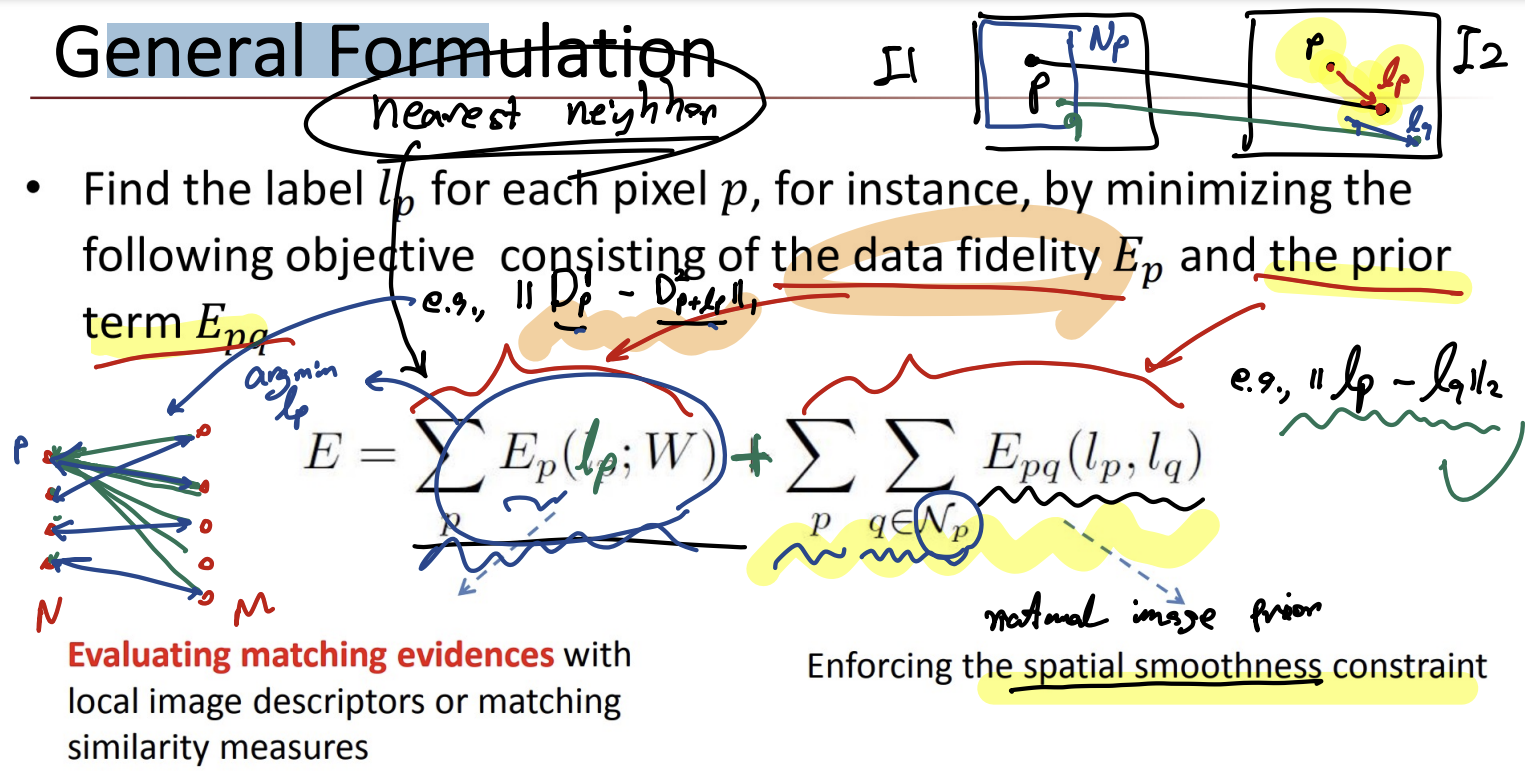
예를들어 이미지1과 이미지2가 있다고 하자
이 때 Dense Correspondence는 이미지1과 이미지2의 Pixel Level Correspondence를 다음과 같은 Energe Function을 사용하여 풀 수 있다.
1. Stereo Matching
2개의 카메라를 사용하여 3D Depth Map을 추측하는 알고리즘
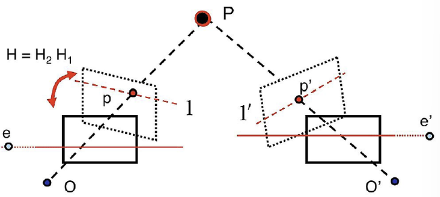
1) Epipolar Geometry
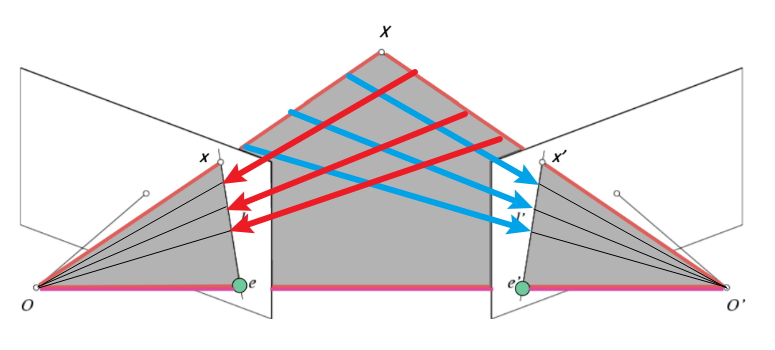
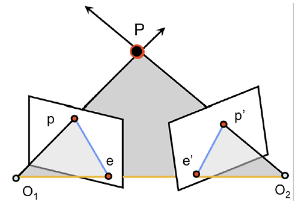
한 물체를 두 카메라로 관찰할 때, 이미지 위의 점 $x, x’$에서 보인다고 하자.
- Epipolar Line
- 양 카메라의 원점을 이은 점과 이미지가 겹치는 부분을 $e, e’$라고 할 때, $\overline{PE}, \overline{O’E’}$에 해당한다.
- Epipolar Plane
- 검정색으로 색칠된 평면
Rectification
$l’ = E^Tp$
$p^TEp’ = 0$ⅰ. Essential Matrix
$\quad$: Intrinsic Parameter를 고려하지 않는
$\quad$ 변환행렬($E$)을 구한다.
$\;$ⅱ. Fundamental Matrix
$\quad$ Intrinsic Parameter를 고려하여 변환행렬을 구한다.
$\quad$ 이를 통해 Epipolar Line을 구할 수 있다.
※ 8-Point Algorithm
$\quad$: 8개의 Pair Point를 활용해 $F$를 계산하는 알고리즘
$\;$ⅲ. Rectification
$\quad$: Epipolar line들을 평행하게 만드는 변환행렬 $H$를
$\quad$ 찾는 것
$\quad \Rightarrow$ Epipolar line이 같은 높이에 있게 되어 가로방향의
$\quad$ 좌표차이를 구하는 1D Search Problem이 된다.
2) Stereo Matching
Stereo Matching이란, 이제 Rectification이 완료된 두 이미지에서 1D Search를 하는 과정이라고 정의할 수 있다.
※ Disparity: 1D Search시에 대응되는 두 점 사이의 거리
.png)
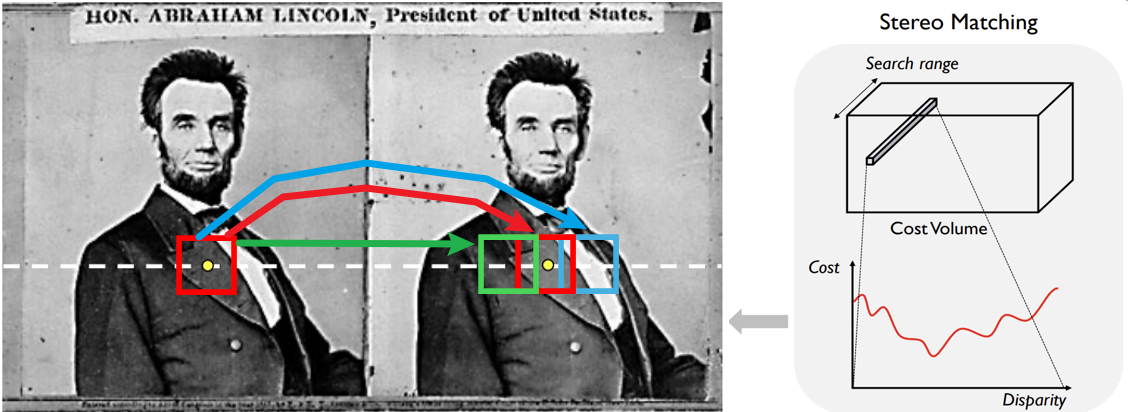
가장 기본적인 구조는 위와 같다.
즉, Window를 만들어 움직이면서 Similarity를 측정하고 이를 Maximize하는 점을 찾으면 된다.
그렇다면 이 Similarity를 어떻게 측정할 수 있을까?
이 방법에 따라 Stereo Matching의 종류가 나뉜다.
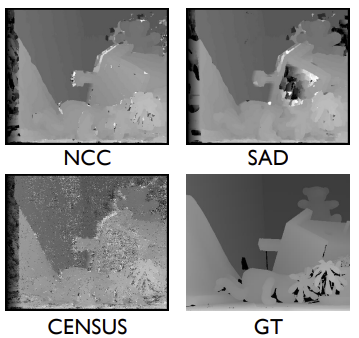
Classical method
※ SAD: Matrix간의 L1-Norm
※ SSD: Matrix간의 L2-Norm$\Rightarrow$ BUT Repetitve Pattern를 갖거나 Reflective/Transparent Surface, Occlusion된 물체에 대해 성능이 떨어지는 단점이 있다.
또한 Noise나 얇은 물체 등을 못잡는 문제가 발생함Deep Learning
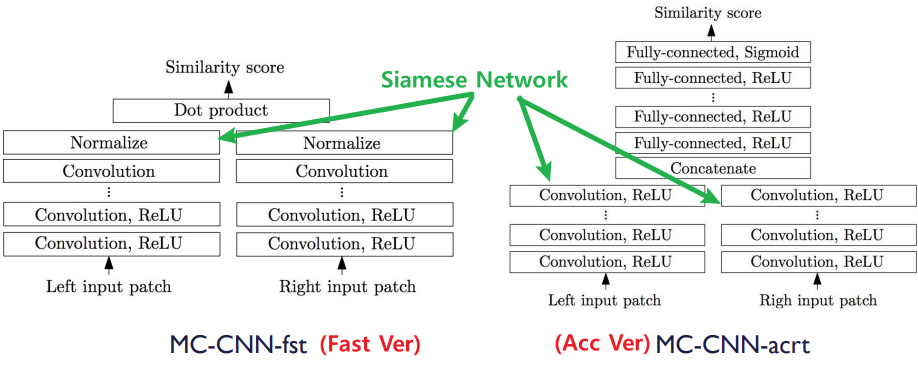
Architecture Absract 기본적으로 먼저 Siamese Network를 사용하여
두 Patch의 Fature를 추출
ⅰ. MC-CNN-fst
$\quad$ - 빠르게 Similarity Score를 추출하는 방법
ⅱ. MC-CNN-acrt
$\quad$ - 느리지만 정확하게 Similarity Score를 추출
2. Mothion Estimation(Optical Flow)
Stereo Matching은 1D Search Problem이었다면 Optical Flow는 2D Search Problem이다.
1) FlowNet & DispNet
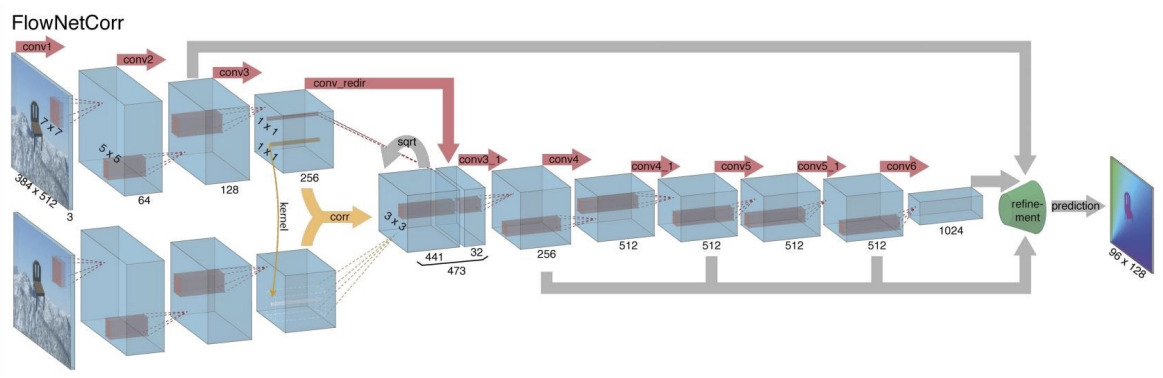
- shared network로 featuremap 추출
- 한 Pixel에 대해 다른 Patch의 2D Window와의 Correlation Volume을 추출
- 이 Pixel은 다시 Convolution을 통해 모양을 조절하여 Corrrelation Volume과 Concatenate
- Convolution Layer로 구성된 Encoder와 Decoder를 거쳐 Optical Flow 예측 (like unet)
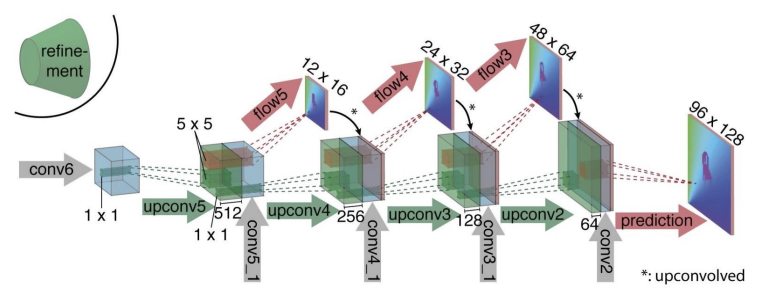
Refinement
- Decoder는 위와 같은 구조로 설계되었고 학습시에는 Ground Truth를 Resize하여 Low Level에서도 학습을 진행
(Multi-Task Learning)
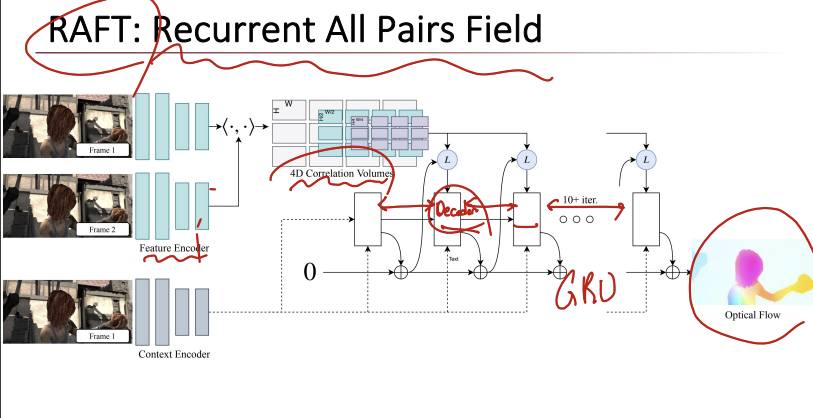
RAFT
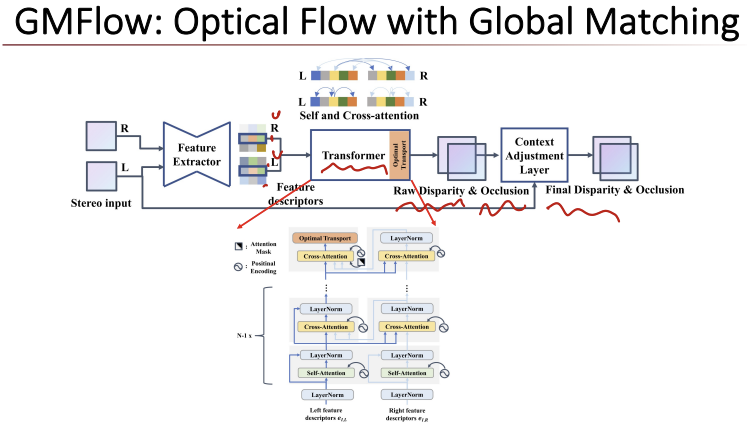
GMFlow