1. Visual Correspondence(1)
Sparse Correspondence
특정 점들을 통해 이미지간의 매칭을 수행하는 것
즉, 이 특징점들을 추출하여 Vector화할 때, 다음 두가지 Property를 구현하는 것이 중요하다.
- Robustness: 비슷한 Feature들은 가까운 거리에 존재하는 것
- Distinctiveness: 다른 Feature들은 먼 거리에 존재하는 것
(Next: Dense Correspondence: flow예측과 같이 모든 점들을 활용해 Pixel간의 매칭을 수행하는 것)
1. Classical Method
Image Matching의 Classical한 Pipeline은 다음과 같다.
| Feature Detect | $\rightarrow\qquad$ Feature Descriptor | $\rightarrow\qquad$ Matching |
|---|---|---|
| \(\begin{bmatrix} \text{'Salient'}\\ \text{Repeatable'} \end{bmatrix}\)한 Point 찾기 | 점의 특징을 수학적으로 표현 | $N \times M$개의 Matching Candidate 비교 |
※ Salient: 두드러진
※ 8-Point Algorithm: 8개의 Matching Point를 통해 두 이미지의 기하학적 관계를 추정하는 알고리즘
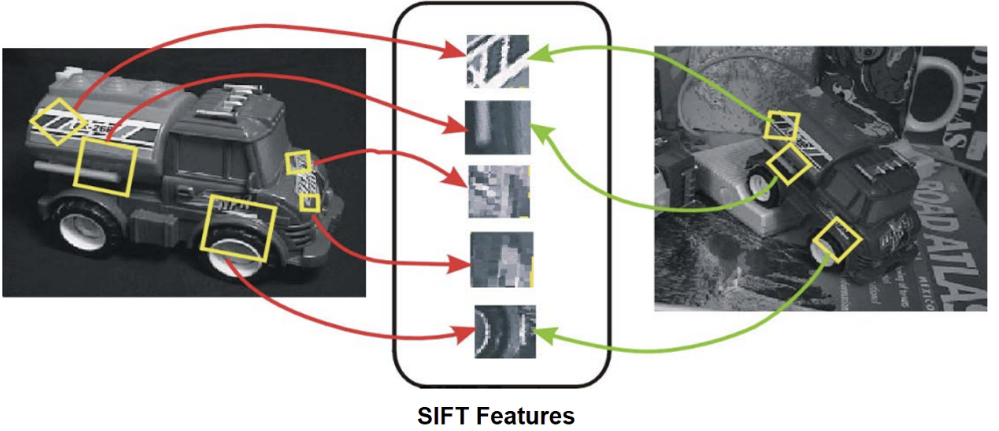
1) SIFT
Step1: Detection
SIFT는 Blobs Detector로, Feature Detect시에 Blob한 지점들을 찾는다.
(※ Harris Corner: Corner Detector)
또 추가적으로 Scale Invarient하게 동작할 수 있도록 설계한다.Blob을 찾을 수 있는 방법에는 다음 2가지 방법이 있다.
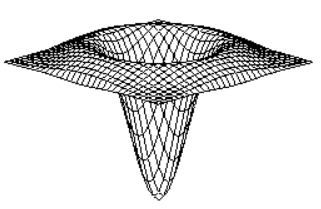
LoG(Laplacian of Gaussian) DoG(Difference of Gaussian)
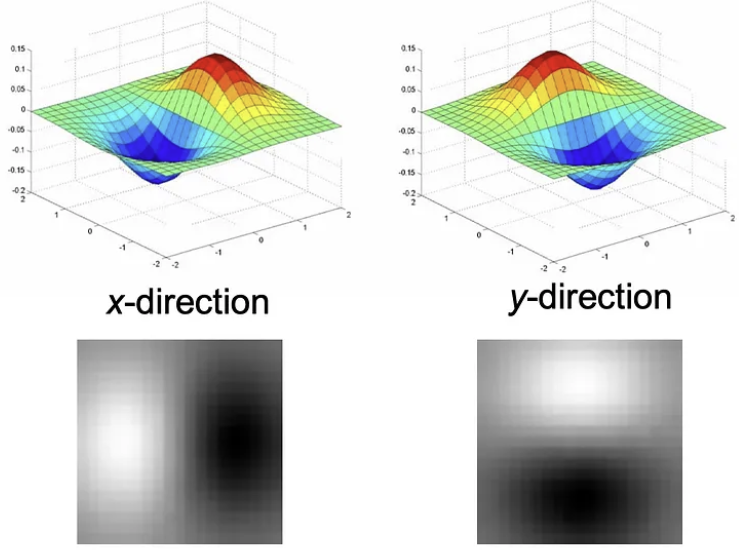
Gaussian Filter에 Laplacian을 적용한 Filter,
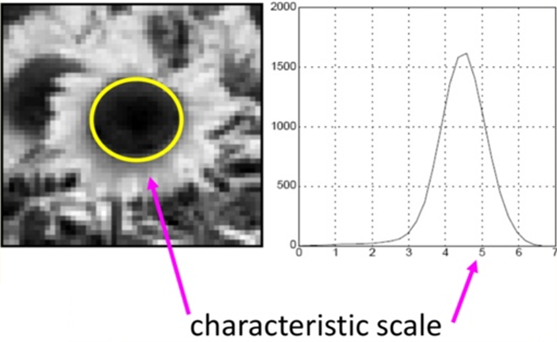
BandPass Filter, Blob한 점에서 큰 반응을 보임
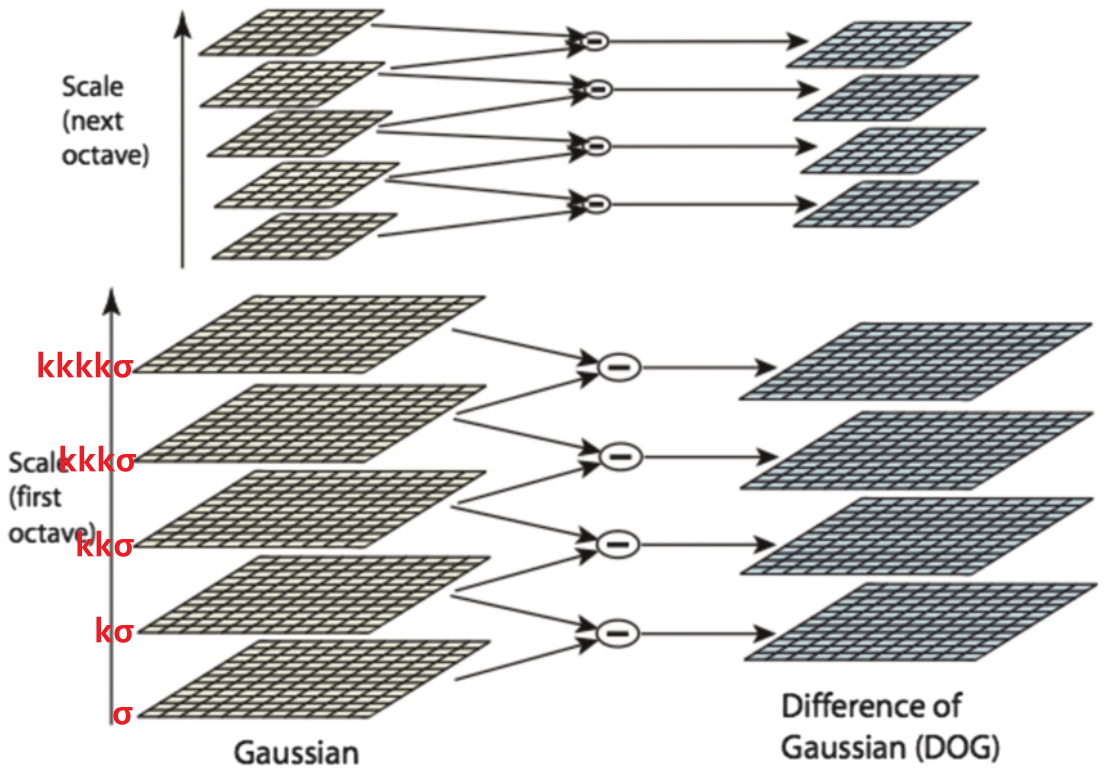
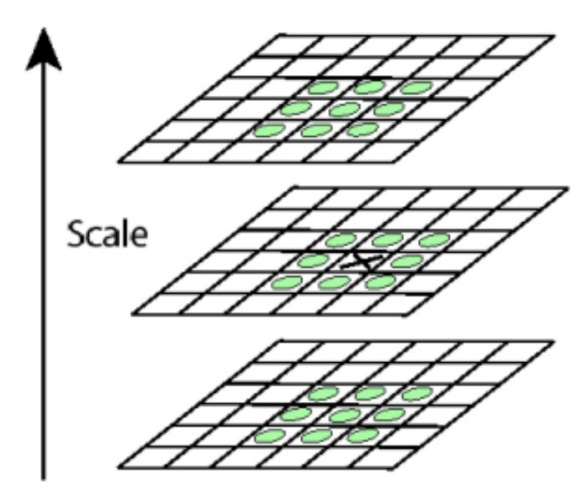
($\sigma$를 변화시키며 가장 큰 반응이 오는 값을 찾음)Gaussian Pyramid에서 같은 Octave에 있는
이미지 2개를 뺀 값으로 LoG에 근사할 수 있다.LoG이미지나, DoG이미지들을 필터의 크기나 이미지의 크기를 조절해가며 Pyramid 구조로 쌓음으로써 Scale Invarient하게 동작하도록 설계할 수 있다.
여기서 유의해야 할 점이 LoG Pyramid를 사용할 경우 다음과 같은 문제가 발생한다는 점이다
- Computational Cost가 크다
- 미분 시 Noise가 증폭되는데 Log는 미분을 두번한다.
즉, 위와 같은 문제들을 방지하기 위해 SIFT에서는 DoG Pyramid를 사용한다.
\[\Downarrow\]\[\Downarrow\]
3D NMS KeyPoint Localization $D(\mathbf{x}) = D + \frac{\partial D^T}{\partial \mathbf{x}} \mathbf{x} + \frac{1}{2} \mathbf{x}^T \frac{\partial^2 D}{\partial \mathbf{x}^2}\mathbf{x}$
$D(\mathbf{x})’ = 0$
(DoG 이미지($D$)의 2차 근사의 극값)
$\qquad \Downarrow$
위에서 구한 DoG Scale Space에서 상하좌우
28개 점과 비교하여 가장 큰 점을
Corner후보군으로 선택한다.3D NMS를 통해 고른 점은 Corner뿐만
아니라 Edge도 포함되어 있다.
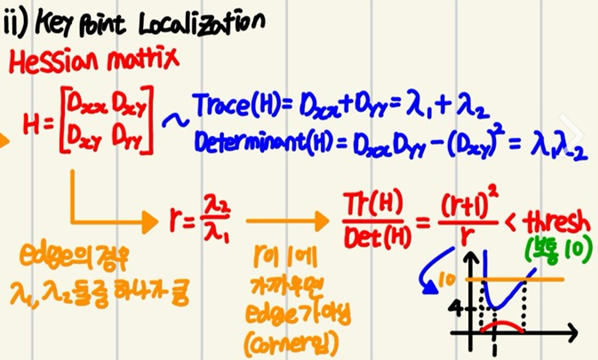
SIFT에서는 이를 걸러줄 방법으로
DoG 이미지의 Hessian Matrix를 이용한다.지금까지 ⅰ) Dog를 통해 특징점 후보군 추출, ⅱ) 3D NMS + KeyPoint Localization으로 특징점의 위치와 크기를 확정하였고
이제 ⅲ) 특징점의 방향을 할당해 줄 차례이다.
Orientation Assignment
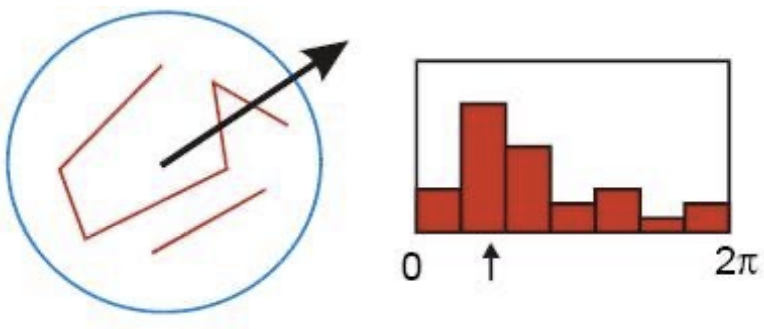
특징점의 위치에서 Scale범위 내의 모든 점들에 대해
다수가 가리키는 방향으로 Keypoint의 방향을 설정한다.이때, Dominant한 방향이 여러개일 경우
각각의 방향을 가지는 Blob을 여러개 설정한다.Step2: Description
Step1에서 KeyPoint를 구했고, 이제 Matching을 위해 서로 다른 KeyPoint를 식별/구분할 수 있는 Finger Print를 만들어야 한다.
이를 Descriptor라고 한다.
Image에서 Keypoint별로 $4 \times 4$개의 Window로 나눈다.
그리고 이 Window를 다시 $4 \times 4$개의 Sub-Window에
할당한다. (총 $16 \times 16$으로 나뉨)
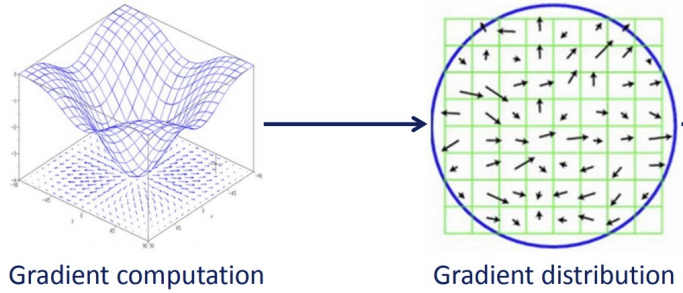
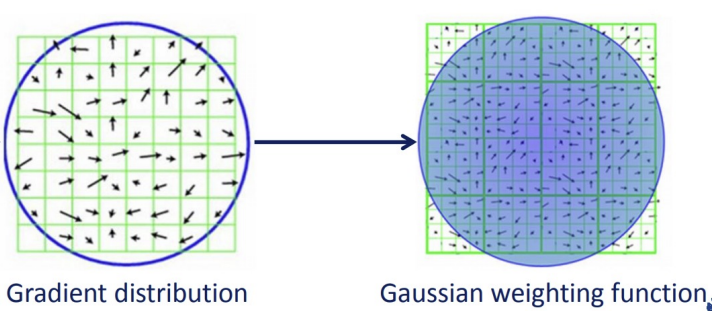
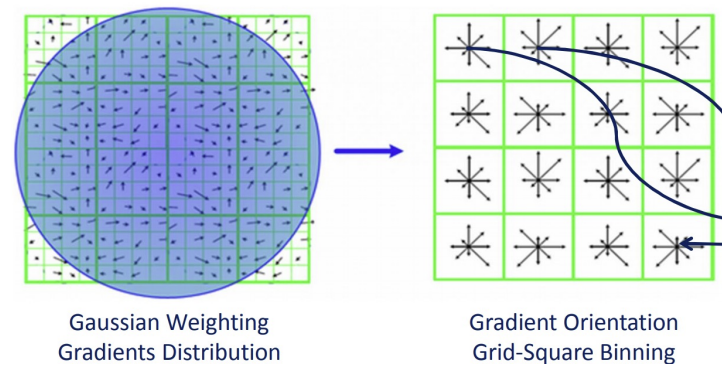
마지막으로 각 구역별로 Image Pixel값에 기반해
Gradient를 계산한다.이 Gradient들을 Noise에 Robust하게 작동하도록
하기 위해 Gaussian Filter를 적용해준다.이제 Window별로 할당된 모든 구역에 대해
8개의 방향을 갖는 Orientation Histogram을 그린다.
(Window당 $8 \times 4 \times 4 = 128$차원의 Vector가 생긴다.)완성
.png)

2. Deep Learning
1) Feature Descriptor(Metric Learning)
Metric Learning에서는 Hinge Loss를 주로 사용하여 Matching여부의 결정경계를 찾는다.
\[Loss(y, \hat{y}) = \min \limits_w \begin{Bmatrix} \frac{\lambda}{2} \Vert w \Vert_2 + \sum \limits_{i=1}^N \text{max}(0, 1-y_i\hat{y}) \end{Bmatrix}\]※ Metric Learning: 입력 이미지간의 유사도(거리)를 학습하는 모델
Paper1: DeepCompare
※ Network: Descriptor 역할
※ Decision Layer: Matching 역할
Architecture 2-Channel Model
2개의 Patch를 Channel방향으로 Concatenate하여 입력함
문제점
Patch Pair간의 중복된 부분을 Pair-Wise하게 계산하기 때문에
Descriptor의 재사용이 불가능하다.
(ex. [P1, P2]에서 사용한 Descriptor는 [P1, P3]에서 사용 불가 )
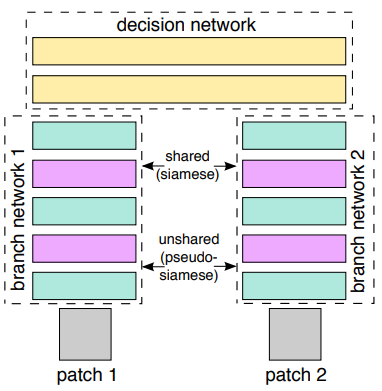
$\Rightarrow$ Computational Cost가 큼Siamese Model
1개의 Patch($P_1$)에 대해 Descriptor를 추출하고, 이 가중치를
그대로 사용하여 다른 Patch($P_2$)의 Descriptor를 추출
$\Rightarrow$ $P_1$과 ($P_3, P_4, P_5…$)를 비교할 때,
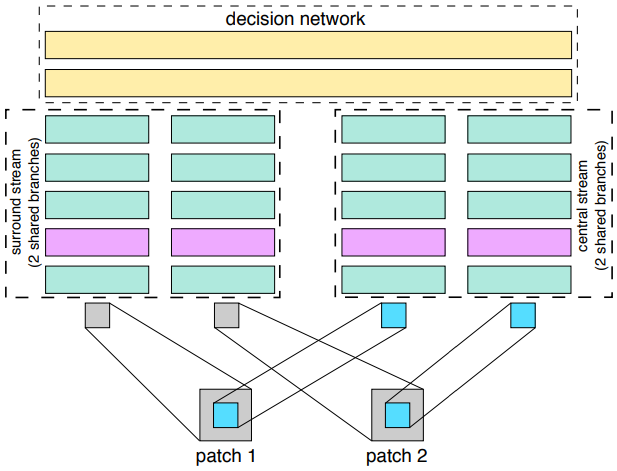
$\quad$ 추가적인 계산이 필요 없다.2-Channel 2-Stream Model 2개의 독립적인 Stream을 통해 Patch를 비교하는 방식
(2-Channel모델 2개를 합쳐놓은 모델)
ⅰ. Stream 1: 두 Patch의 중심부를 비교하는 Stream
ⅱ. Stream 2: 두 Patch의 주변부를 비교하는 Stream
$\Rightarrow$ 다양한 Receptive Field에서 비교할 수 있음$\Rightarrow$ Decision Network가 여전히 필요하다는 단점
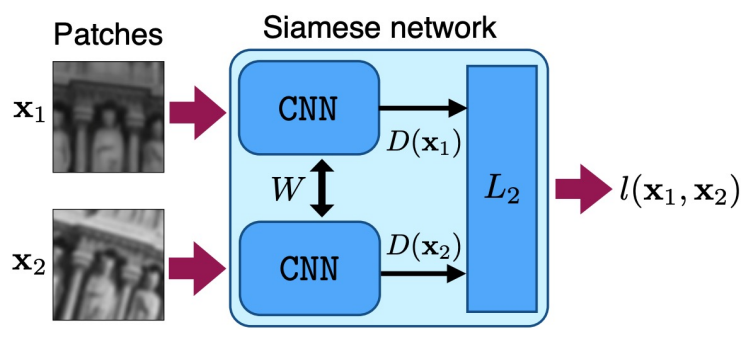
Paper2: DeepDesc
Architecture 별도의 Decision Network없이 Siamese Network에서 추출한
Descriptor Vector들의 L2-Norm을 출력
Pairwise Hinge Loss
\(l(\mathbf{x}_1, \mathbf{x}_2) = \begin{cases} \Vert D(\mathbf{x}_1) - D(\mathbf{x}_2) \Vert_2, \quad p_1 = p_2 \\ \text{max}(0, C-\Vert D(\mathbf{x}_1) - D(\mathbf{x}_2) \Vert_2), \quad p_1 \neq p_2\end{cases}\)Hard Negative Mining
Hard Negative란 실제로는 Negative인데 Positive라고 잘못 예측하기 쉬운 데이터를 말한다.
반면에 Easy Negative란 실제로도 Negative이고 예측도 Negative라고 예측하기 쉬운 데이터를 말한다.주로 False Positive Sample이 Hard Negative데이터가 되는데, 이 이유는 보통 Positive에 해당하는 것을 학습하는 것을 목표로 하기 때문에 잘못 예측한 False Negative Sample은 잘 고려하지 않기 때문이다.
Hard Negative Mining은 이런 Sample들을 추출해 데이터셋에 포함시켜 학습하는 방법이다.
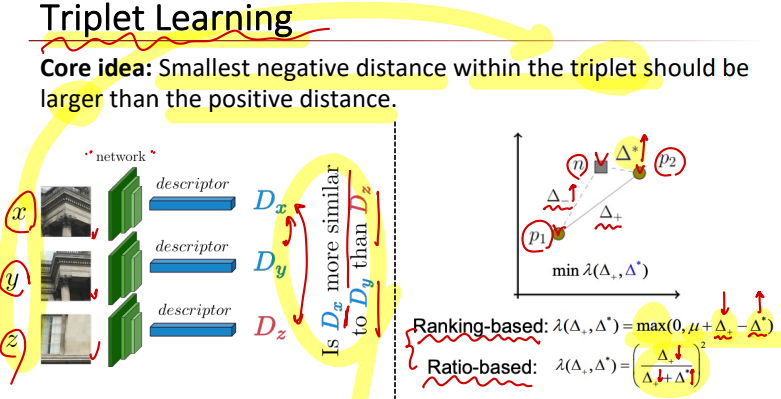
Paper3: Triplet Learning

2) Orientations
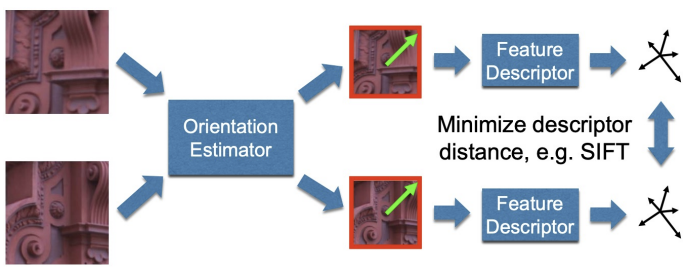
이 후에는 Orientation까지 Neural Network로 추측하는 모델도 등장하게 된다.
즉, 이 Network를 사용하여 End-To-End로 Feature Descriptor를 추출하는 모델을 완성할 수 있다.
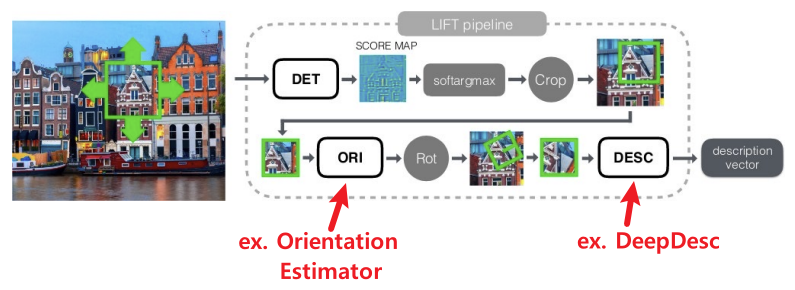
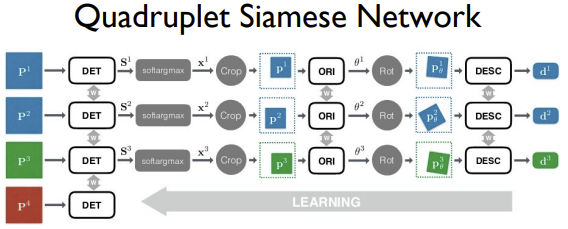
Paper1: LIFT
(아마 처음으로 End-To-End Feature Descriptor를 만든 논문인듯?)
Pipeline Quadruplet Siamese Netowrk
($\approx$ Triplet Network)Test Time에는 Score Map을 추출하고 난 후, Score Pyramid를 만들고 NMS를 수행하는 과정을 통해 SIFT의 DoG와 비슷한 과정으로 구현하였다.
Paper2: SuperPoint
Paper3: D2Net
3) Matching
Classical한 Matching 방법에는 다음이 있다.
| NM | MNN |
|---|---|
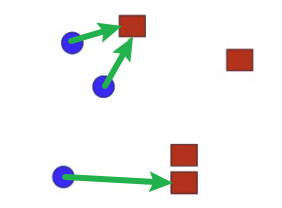 | 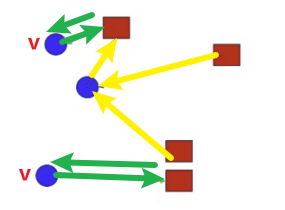 |
| Matching하고자 하는 점에서 가장 가까운 점을 찾는 것 | Matching의 주체와 대상이 모두 가까운 경우에만 수행하는 것 |
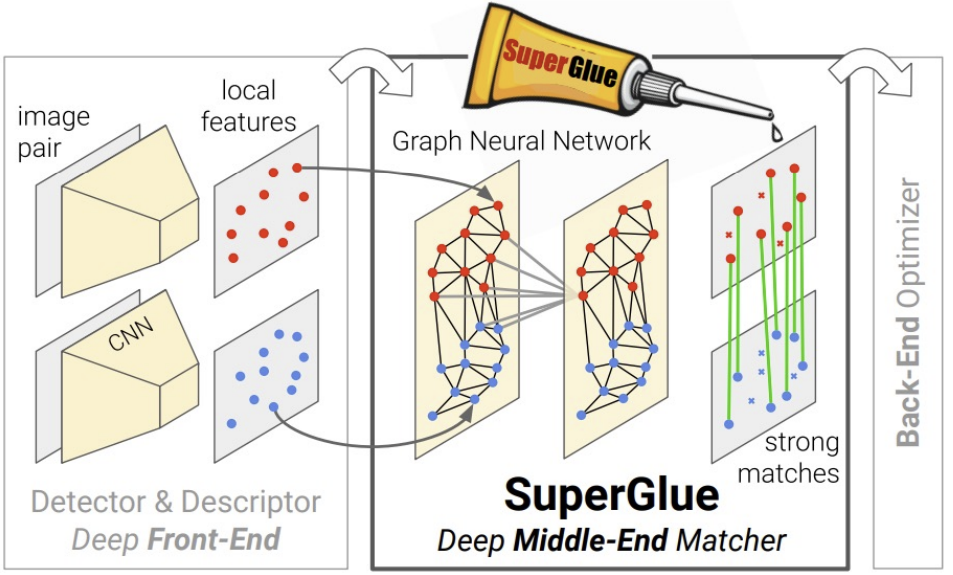
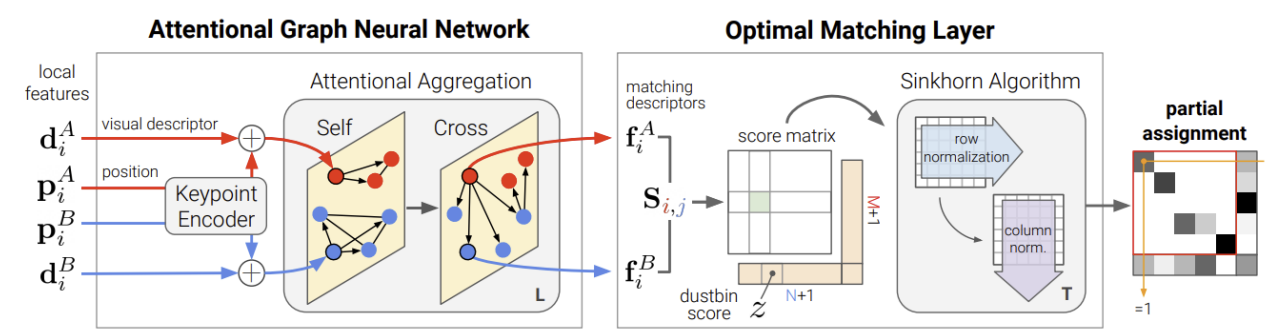
Paper1: SuperGlue
Architecture Paper2: LoFTR
Architecture Abstract Transformer를 기반으로 Pixel-wise Dense Match를
목표로 하는 모델
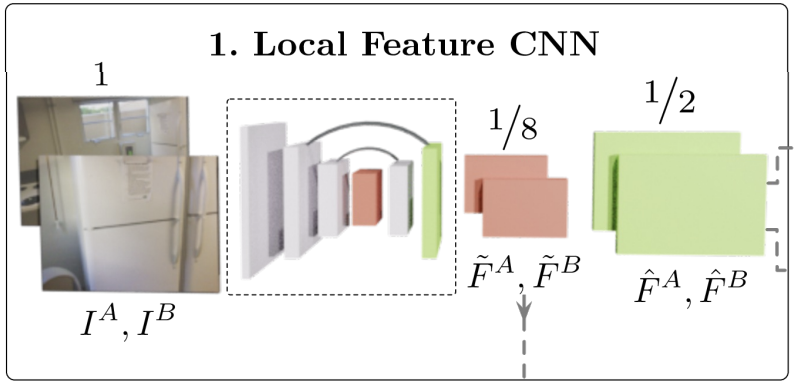
Procedure ⅰ. Local Feature CNN
$\quad$ ◆ CNN을 거쳐 이미지로부터 Low Level Feature를
$\quad\;\,$ 추출한다.
$\quad \; \, \rightarrow$($\frac{1}{8}H, \frac{1}{8}W$)의 크기
$\quad$ ◆ UNet구조와 비슷하게 Low Level Feature를
$\quad \;\,$ Upsampling하여 더 정교한 Feature를 추출한다.
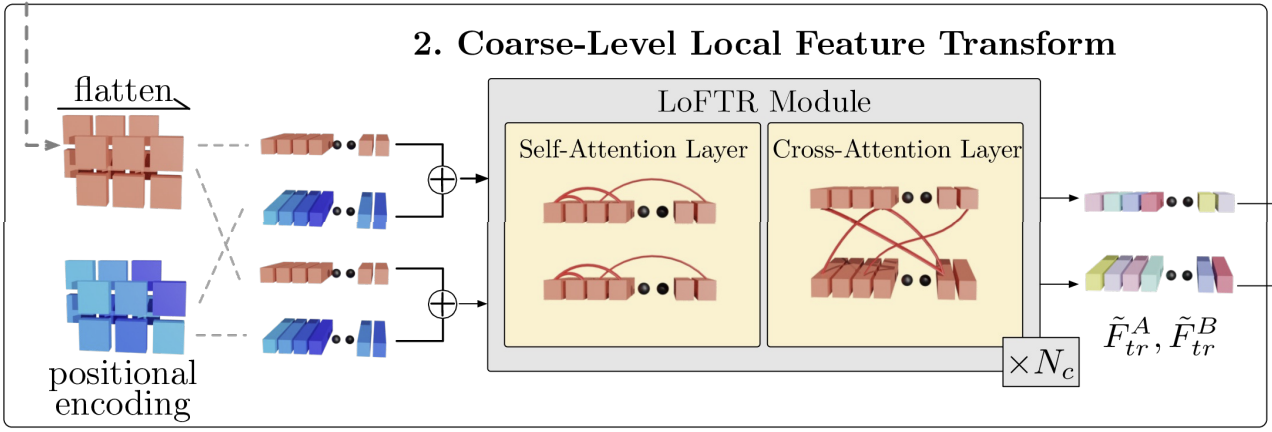
$\quad \; \, \rightarrow$ ($\frac{1}{2}H, \frac{1}{2}W$)의 크기ⅱ. Coarse-Level Local Feature Transform
$\quad$ ◆ Flatten + Positional Encoding
$\quad \;\, \rightarrow$ DeTR과 비슷한 방식으로 Transfomer의 입력을
$\qquad \;$ 위한 준비과정
$\quad$ ◆ LoFTR Module
$\quad\;\, \rightarrow$ Self Attention으로 Patch내의 주요 특징 추출
$\quad\;\, \rightarrow$ Cross Attention으로 Image Matching Pair 생성
$\therefore$ ($\frac{1}{2}H, \frac{1}{2}W$)의 Coarse한 Feature로부터
$\quad$ Feature Vector를 구함
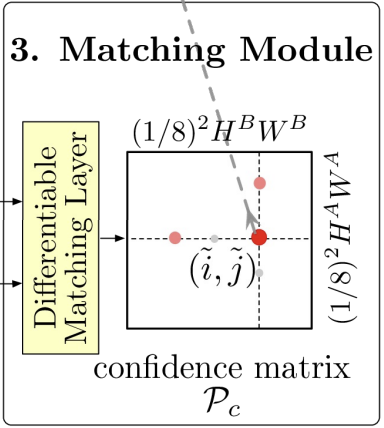
$\,$ⅲ. Matching Module
$\quad$ ◆ Differentiable Matching Layer
$\quad\;\, \rightarrow$ 두 Feature Vector의 유사도를 계산하여
$\qquad \;$ Confidence Matrix를 만듦
$\quad$ ◆ Confidence Matrix
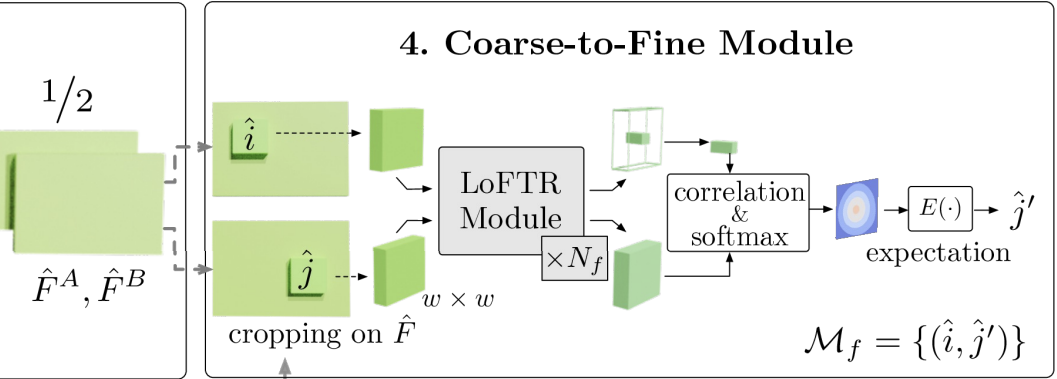
$\quad\;\, \rightarrow$ i가 J와 Matching될 확률(대칭행렬은 아님)ⅳ. Coarse-to-Fine Module
$\quad$ ◆ Crop
$\quad\;\, \rightarrow$ 처음에 얻은 ($\frac{1}{2}H, \frac{1}{2}W$)의 두 Feature Map에서
$\qquad\;$ i, j Pixel을 중심으로한 Patch를 Crop
$\quad$ ◆ LoFTR Module
$\quad\;\, \rightarrow$ 두 Patch간의 유사도 검증※ Coarse: 조잡한(정제되지 않은?)
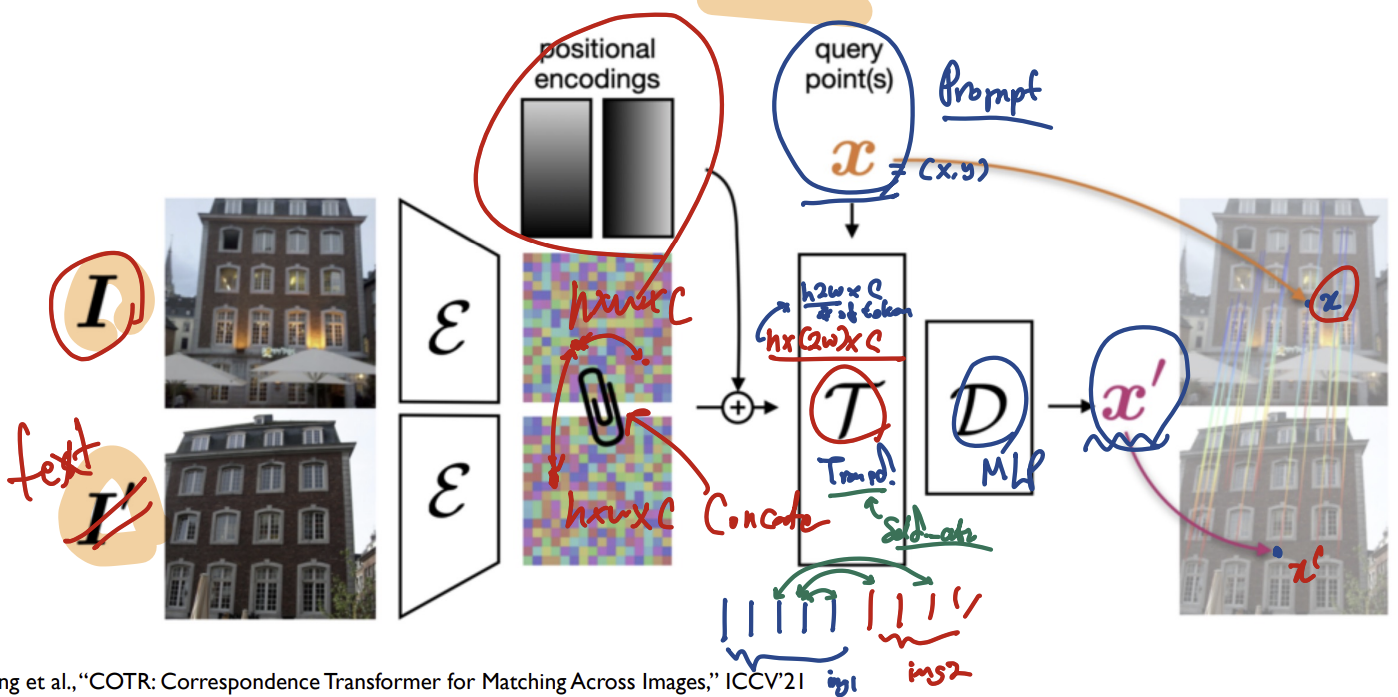
Paper3: COTR
- 중간에 Concatenate하고 Self Attention을 해줌으로써 Cross Attention(Image Matching)의 효과를 얻을 수 있음
- Matching Point인 x’을 찾기위해 x를 Query로 사용