2. Search
Background
1) Define
인공지능이 문제를 해결할 때 사용할 수 있는 방법은 앞으로 취할 수 있는 행동들을 미리 시뮬레이션 해보고, 최적의 결과를 내는 행동을 찾는 것이다.
이때, Uninformed Search는 이 최적의 결과가 무엇인지 알 수 없는, 즉 목표까지 얼마나 남았는지 알 수 없는 상태(Uninformed)에서 행동을 찾는 알고리즘이다.
반면에 Informed Search는 이 목표가 정해져 있는 상황에서 행동을 찾는 알고리즘이다.
2) Terms
State
- 인공지능이 행동을 했을 때, 가능한 상태를 의미한다. 필요없는 Detail들을 제거하는 추상화, 간략화 과정이 필요하다.
(ex. 바둑을 둘 때, 내가 돌을 두고 난 상태)
- Initial State: 초기 상태
- State Space: State들로 이루어진 집합
- Search Tree: State Space를 방향 Graph가 아닌 Tree로 표현하는 것
- Graph Search: State를 방향 Graph로 표현해 Solution을 찾는 것
(visited를 조사 O: Graph Search)
(visited를 조사 X: Tree Search)(tree like: memory $\downarrow$)
(graph: memory $\uparrow$)Action
- 현재 State에서 내가 취할 수 있는 모든 행동들을 의미한다.
(ex. 바둑판에 바둑돌이 없는 칸에 돌을 두는 것)
- Path: Action들로 이루어진 집합
- Solution: Path들 중 목표까지 갈 수 있는 Path
Performance Evaluation
Completeness Cost Optimality Time Complexity Space Complexity 1. Solution을 반드시 찾는지
2. Solution이 없다면 알 수 있는지최적의 Solution을 찾는지 시간 복잡도 공간복잡도
1. Uninformed Search
1) BFS
| 평가함수$f(n)$ | Completeness | Cost Optimal | 시간복잡도 | 공간복잡도 | |
|---|---|---|---|---|---|
| BFS | Action 수 | O | X | $O(b^d)$ | $O(b^d)$ |
| Dijkstra | Start Node $\overset{Cost}{\leftrightarrow}$ Current Node | O | O | $O(b^{1+\frac{C^*}{\epsilon}})$ | $O(b^{1+\frac{C^*}{\epsilon}})$ |
$b$: Branch factor
$d$: solution의 depth
$\epsilon$: action의 최소 Cost
$C^*$: Optimal Solution의 Cost
FIFO(Firt In First Out)을 기반으로 구현하는 알고리즘이다.
Uniform-Cost Search (Dijkstra)
BFS에서 Heap과 같은 Priority Queue를 사용하고
Goal test는 원래의 BFS보다 나중에 해서 Cost Optimal을 보장해 준다.
(단, Cost는 0보다 커야함)

2) DFS
| Completeness | Cost Optimality | Time Complexity | Space Complexity | |
|---|---|---|---|---|
| DFS | O(finite state space) X(infinite state space) | X | $O(b^m)$ | $O(b^m)$(graph like) $O(bm)$(tree like) |
| BackTracking | O(finite state space) X(infinite state space) | X | $O(b^m)$ | $O(m)$ |
| Depth-Limited | X | X | $O(b^l)$ | $O(bl)$ |
| Iter-Deepening | O | X | $O(b^d)$ | $O(bd)$ |
$b$: Branch factor
$d$: Solution의 depth
$m$: Maximum depth
$l$: Depth Limit
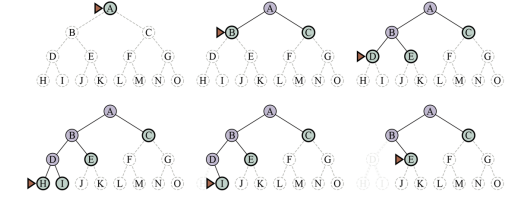
LIFO(Last In First Out)을 기반으로 구현하는 알고리즘이다.
Back Tracking
DFS는 Node의 모든 Child를 바로 생성하여 각 Child의 조건을 검사한다.
하지만 Back Tracking은 메모리를 아끼기 위해 한번에 하나씩 생성하여 조건을 검사해간다.
Depth-Limited Search
일반적인 DFS는 무한 roop에 빠질 수 있다.
이를 막기위해 ⅰ. Cycle을 확인하고, 뻗을 수 있는 Depth에 ⅱ. Limit을 설정하여 그 이상은 Cutoff한다.
Iterative Deepening Search
Depth Limit을 0부터 $\infty$까지 증가해가며 Depth Limited Search를 진행하는 방식
Iterative Lengthning Search
Cost Limit를 0부터 $\infty$까지 증가시키며 Search하는 방식
이때, 다음 Cost는 연속적이기 때문에 다음 Iter의 Limit은 이전 Iter의 최솟값으로 한다.
Hybrid Approach
DFS는 시간이 오래걸린다.
따라서 BFS로 메모리가 어느정도 찰 때 까지는 탐색하다가 Iterative Deepening으로 바꾸는 전략을 쓸 수도 있다.
3) Bidrectional Search
| Completeness | Cost Optimality | Time Complexity | Space Complexity | |
|---|---|---|---|---|
| Bidirectinal | O | X | $O(b^\frac{d}{2})$ | $O(b^\frac{d}{2})$ |
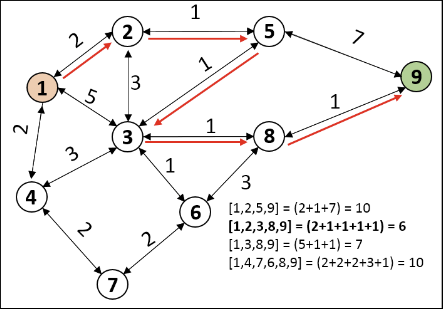
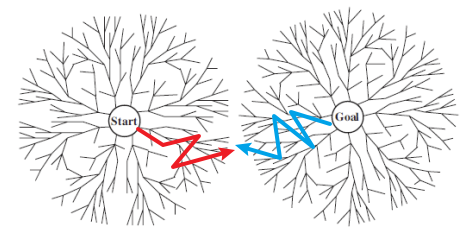
Goal State를 알 때 쓸 수 있는 방법으로 Goal지점과 Start지점에서 모두 Dijkstra 방법으로 Search를 시작하는 방법이다.
(이때, 먼저 연결되었다고 해서 Cost Optimal이라는 보장이 없다.)
2. Informed(Heuristic) Search
1) Best-First Search
| 평가함수$f(n)$ | Completeness | Cost Optimal | 시간복잡도 | 공간복잡도 | |
|---|---|---|---|---|---|
| GBFS | Current Node $\overset{Cost}{\leftrightarrow}$ Goal Node | X(graph like) O(tree like) | X | $O(b^m)$ | $O(b^m)$ |
| $A^*$ | Start Node $\overset{Cost}{\leftrightarrow}$ Current Node $+$ Current Node $\overset{Cost}{\leftrightarrow}$ Goal Node | O | O | $x \leq O(b^d)$ | $x \leq O(b^d)$ |
| $SMA^*$ | O | O | $x \leq O(b^d)$ | $x \leq O(b^d)$ |
각 Node들에 대해 평가함수 $f(n)$이 가장 작은 Node들을 확장해 나가며 Search하는 알고리즘이다.
따라서 주로 HEAP을 기반으로 구현한다.
이때 $f(n)$으로 휴리스틱 함수를 사용하기도 하는데 다음에 주의하자
※ $H(n)$
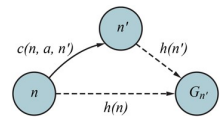
Optimal Heuristic Function Consistent Heuristic Function $h(n) \leq h^*(n)$ $h(n) \leq c(n, n_{next}) + h(n_{next})$ 실제 거리보다 예측 거리가 항상 클 때
Optimal하다.즉, 다음 Node에서의 Goal까지의 거리가
현재 Node에서 Goal까지의 거리보다 항상 작을 때
(Optimal보다 더 까다로운 조건이다.)Greedy Best-First Search
평가함수가 현재노드부터 Goal Node까지의 Heuristic 추정 거리이다.
$A^*$ Search
평가함수가 시작Node부터 현재Node까지의 실제 거리와 현재Node부터 Goal Node까지의 추정 거리를 합한 함수이다.
Iterative Deepening $A^*$ Search
iterative Deepening(Lengthning) Search와 비슷하게 limit cost를 정한 후 이를 반복적으로 갱신하며 $A^*$ Search를 수행하는 알고리즘이다.
마찬가지로 반복시 cost는 이전 cost의 최솟값으로 갱신한다.
Simpleified Memory-Bounded $A^* $ Search ($SMA^*$)
$A^*$를 메모리가 가득 찰때까지 수행하다가
메모리가 가득차면 가장 높은 Cost를 갖는 node들부터 drop해가며 계산하는 방식
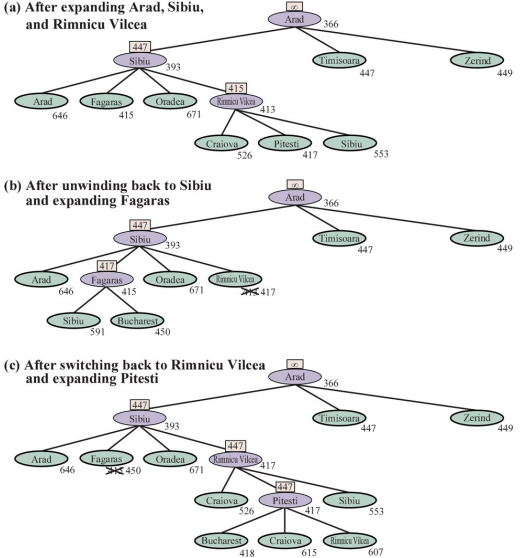
2) Recursive Best-First Search (RBFS)
| Completeness | Cost Optimality | Time Complexity | Space Complexity | |
|---|---|---|---|---|
| RBFS | O | O | $O(b^d)$ | $O(bd)$ |
Depth First와 $A^*$를 결합한 방식
1. Sibling 생성 2. best($f(n)$이 가장 낮은 것)와
alternative(두번째로 낮은 것) 설정3. 만약 $best.f$가 f_limit보다
커지면 best.f를 return4. parent와 alternative의 f_limit 중
작은 값을 사용해 다시 RBFS 반복5. 현재 Node(best)의 f값은
return될 RBFS의 f값으로 설정
.png)
.png)
.png)
.png)