[Paper Review] PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
1. BackGround
1) 3D Representation
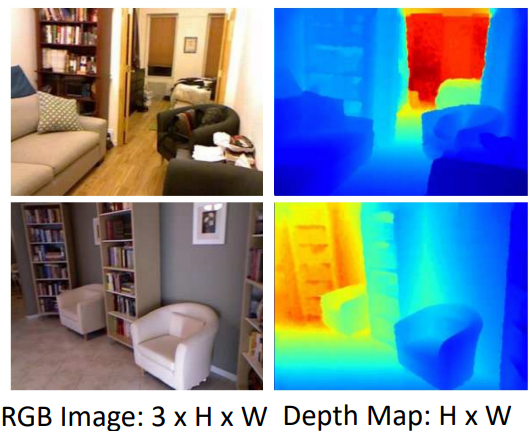
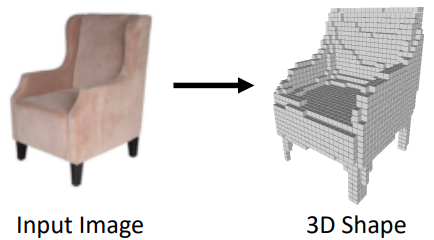
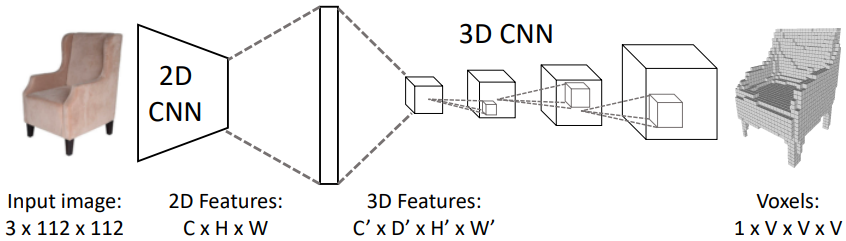
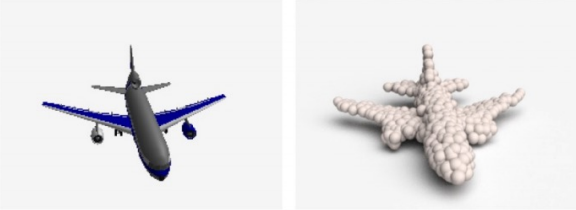
Depth Map Voxel Grid PointCloud Distance between the camera and pixels Represented as a 3D Grid Represented as a “collection” of points
(Volume: X, Location: O)(+) Can utilize 2D images (+) Conceptually easy to understand (+) Can represent structures
$\quad$ with a small number of points(-) Difficult to perform 3D tasks (-) Requires a lot of memory for detailed
$\;\;\;$ representation.
$\;\;\;$(3D Kernel $\rightarrow$ 3D CNN usage)(-) Cannot represent surfaces
(-) Needs a new type of Loss
$\;\;\;$ (Because it’s a “collection” of points)
Mesh Implicit Surface A “collection” of triangles made up of “vertices” and “faces”
● Vertices: Corners of the triangles
● Face: Surface of the triangleA method of representing 3D shapes as functions (+) Mainly used in Computer Graphics
(+) Adaptive representation is possible by using
$\quad$ more faces where detailed representation is needed
(+) Can also represent additional information such as
$\quad$ color and texture using things like UV Maps(+) Can represent detailed surfaces (-) Not easy to handle in Neural Networks
$\quad$ (Graph Convolution)(-) Requires understanding of the concept


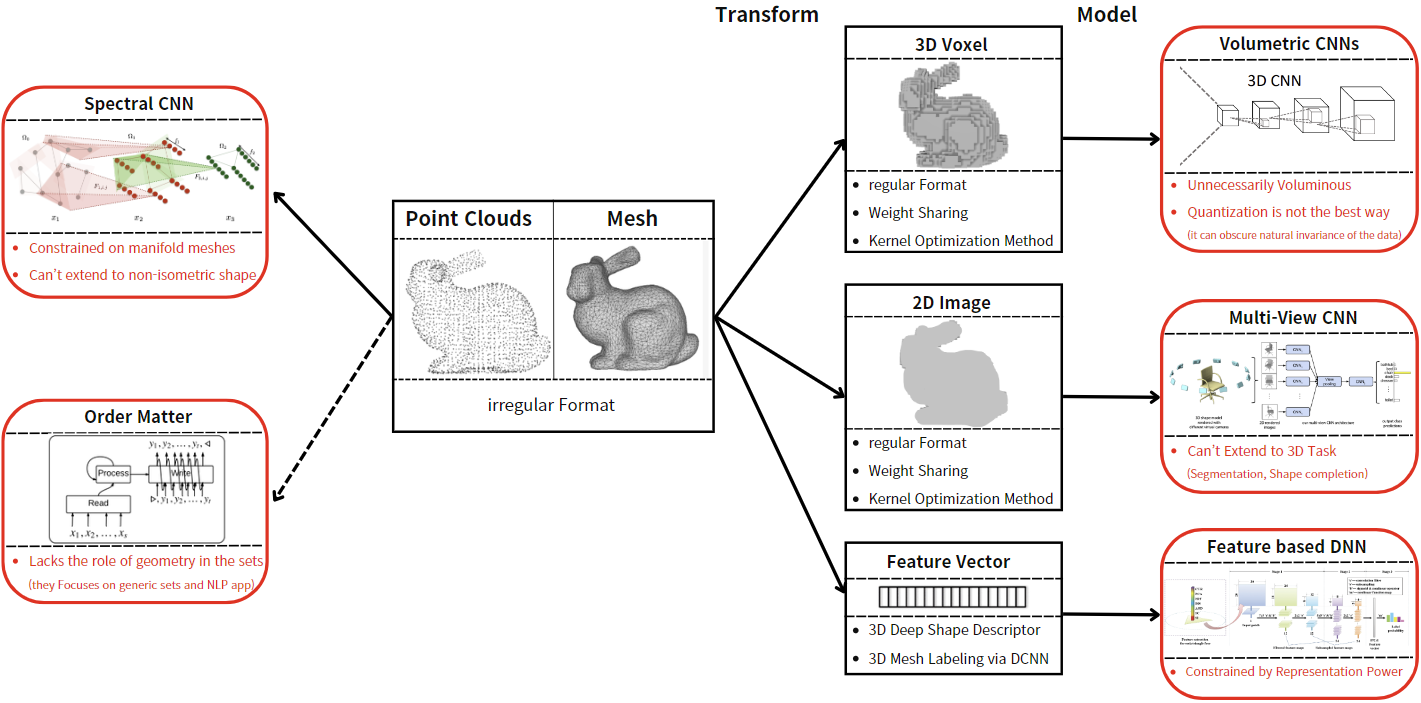
2) Previous Work
2. Proposal
1) Challenges
1) Unordered
Network must invariant to N! Permutation
It means that Network must always predict the same output, even though the order of point cloud is changed
2) Interaction among Points
Model needs to be able to capture Local/Global structures
Even though point cloud is kind of sets, It must be able to interact with surrounding points
3) Invariance under transformations
Learned representation of the point set should be invariant to certain transformation.
It means that Network must always predict the same output, even though the point cloud is changed with rigid transformation
※ rigid transformation: rotation, translation
2) Solution(1) - Symmetric Function
Target Challenges
| Unordered | Interaction among points | Invariance under transformations |
|---|---|---|
| Symmetric Function | _ | _ |
Method1: Sort by Canonical order (X)
We can sort point clouds before entering them into the network
$\rightarrow$ but we can’t make stable network with point perturbation.
Method2: RNN with augment (X)
we can use augmentation that allows RNN model to consider all permutatiopn orders
$\rightarrow$ but we can’t use if we have thousands of input
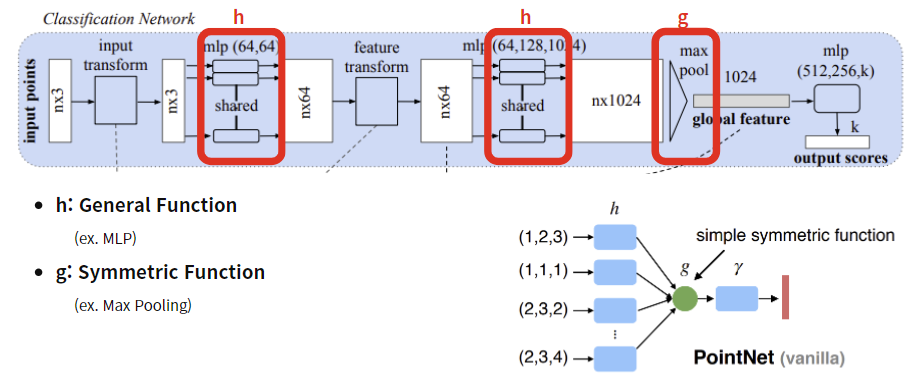
Method3: Use Symmetric Function (O)
we can approximate our network to a symmetric funtion
\[\Downarrow\]
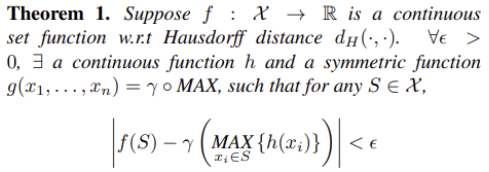
Theory(Hausdorff Distance) Application $f({x_1, …, x_n}) \approx g(h(x_1), …, h(x_n))$
$f: 2^{\mathbb{R}^N} \rightarrow \mathbb{R}$,
$h: \mathbb{R}^N \rightarrow \mathbb{R}^K$,
$g: \mathbb{R}^K \times … \times \mathbb{R}^K \rightarrow \mathbb{R}$
$g$ is a symmetric function
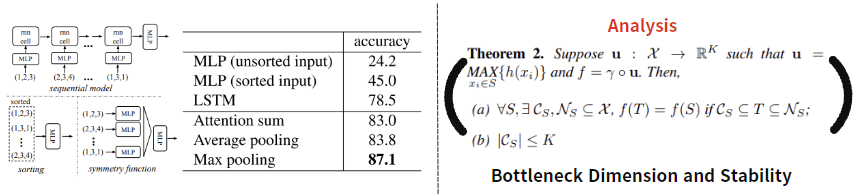
Author stated that using maxpooling as a symmetric function is the best way, because it can make our network learn the critical points of point clouds
3) Solution(2) - Aggregation
Target Challenges
| Unordered | Interaction among points | Invariance under transformations |
|---|---|---|
| Symmetric Function | Aggregation | _ |