2. Perception(1)
인지 센서
인지에 주로 사용되는 센서는 다음과 같다.
| 카메라 | 레이더 | 라이다 | |
|---|---|---|---|
| 특징 | ADAS에 가장 많이 사용 | 전자기파(RF신호) 의 반사파 분석 속도정보를 바로 얻을 수 있음 | 고출력 펄스레이저의 반사신호에 대한 시간차 분석 |
| 장점 | 높은 해상도 저렴한 가격 | 높은 정확도 저렴한 가격 강인한 성능 속도정보 획득가능 | 높은 정확도(먼 거리) 강인한 성능 |
| 단점 | 환경변화에 취약 높은 계산량 낮은 정확도(속도 및 거리) | 높은 오탐률(클러터 현상) 횡방향에서 낮은 정확도 BEV에서만 표현되는 물체검출 결과 | 비싼 가격 습기에 취약 |
이 센서들은 차량 주변 환경에 대한 이해를 담당하게 된다.
이 과정에서 센서들은 다음의 2가지 객체에 대한 1) 위치, 2) 종류, 3) 상대속도 등을 식별한다.
ⅰ. 동적환경객체: 차량, 사람, 동물 등
ⅱ. 정적환경객체: 과속방지턱, 표지판, 신호등 등
목표
- 동적 객체 검출 및 추적
- 동적 객체의 미래 위치 예측
- 정적 객체 검출
- 정적 객체의 정보를 측위에 활용
- 물체까지의 거리를 측정
Dificulty
인지부분에서 가장 어려운 점은 근거리에서 100%의 정확도가 보장되어야 할 정도로 높은 정확도가 핵심이라는 것이다.
하지만 이는 다음과 같은 이유로 인해 매우 어렵다.
- 환경적 다양성
- 차량과 보행자의 행동 예측
- 교통 환경의 문맥적 의미 파악 필요
- 새로운 객체와 물체의 지속적인 업데이트
또한 무엇보다도 이를 위해 여러 인지기술을 동시에 수행할 수 있는 하드웨어가 필요하다는 점도 인지 기술이 극복해야 하는 부분이다.
1. 카메라
1) 요소
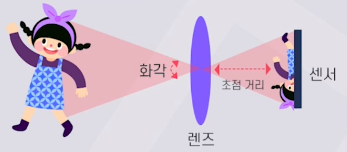
카메라는 빛을 CCD나 CMOS같은 센서를 통해 감지하는 장치이다.
주된 구성은 “렌즈”, “조리개”, “셔터”, “몸체”이다.Notation
- 초점거리(Focal Length)
- 렌즈부터 영상이 맺히는 센서사이의 거리
- 화각(Field of View, FOV)
- 화면을 구성하는 각도
- 해상도(Resolution)
- 2차원 배열의 크기
- Frame Rate
- 1초동안 보여주는 이미지의 수
- 색상표현
- RGB, YIQ, CMY, HIS, …
초점거리와 화각
망원렌즈 표준렌즈 광각렌즈 어안렌즈 화각 $\sim 40^o$ $40^o \sim 60^o$ $60^o \sim 80^o$ $ 180^o \sim$ FOV $70\sim 200(mm)$ $35\sim 38(mm)$ $15\sim 35(mm)$ $7\sim 15(mm)$
- $Focal \, Length\propto \frac{1}{FOV}$
- 렌즈에 의한 외곡보정이 필요하다.
2) 캘리브레이션(보정)
카메라의 2D이미지를 실제 세계에 Mapping하기 위해서는 보정작업이 필요하다.
따라서 캘리브레이션은 2개의 카메라를 활용해 입체적인 촬영을 하는 스테레오 카메라에서 중요하게 사용된다.이를 위해서는 변환행렬이 사용되는데, 어떤부분을 Mapping하는지에 따라 내부파라미터와 외부파라미터로 나뉜다.
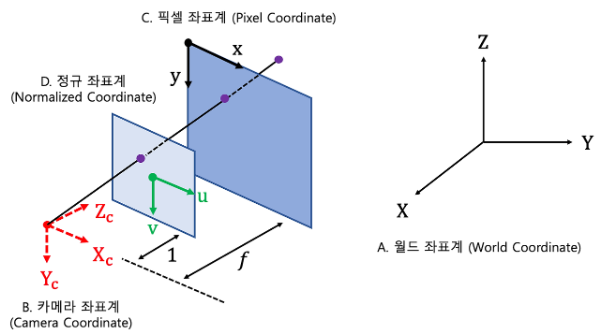
1. 좌표계
월드 좌표계 카메라 좌표계 픽셀 좌표계 물체의 위치를 표현할 때
기준으로 삼는 좌표계
(임의로 설정 가능)1. 카메라의 초점을 원점으로한 좌표계
2. 방향
ⅰ. 원점: 카메라의 초점
ⅱ. x축: 카메라의 오른쪽
ⅲ. y축: 카메라의 아래쪽
ⅳ. z축: 카메라의 정면1. 투영된 이미지의 좌표계
2. 방향
ⅰ. 원점: 이미지의 왼쪽 상단
ⅱ. x축: 카메라의 오른쪽
ⅱ. y축: 카메라의 아래쪽※ 정규 좌표계: 카메라 내부 파라미터의 영향이 없을 경우 투영되는 공간에 대한 좌표계
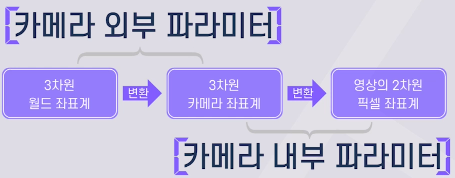
2. 파라미터
외부 파라미터 행렬 내부 파라미터 행렬 변환 월드좌표계 $\rightarrow$ 카메라 좌표계 카메라 좌표 $\rightarrow$ 카메라 영상의 픽셀값
(카메라 내부의 기계적인 셋팅)요소 1. 회전이동
2. 평행이동1. 초점거리: 렌즈의 중심과 CCD/CMOS와의 거리
2. 주점: 렌즈의 중심에서 이미지 센서에 수직으로 내린 점의 영상픽셀좌표
3. 비대칭 계수: 이미지 센서의 y축이 기울어진 정도
4. 렌즈왜곡
5. 영상의 중심값
6. 이미지 센서의 Aspect Ratio
7. 이미지센서의 Skew Factor(렌즈왜곡 모델: 방사형 렌즈왜곡, 접선형 렌즈왜곡)
3. 캘리브레이션
\[w\begin{bmatrix} x & y & 1\end{bmatrix} = \begin{bmatrix} X & Y & Z & 1\end{bmatrix}P\]\[P = \begin{bmatrix} R \\ t \end{bmatrix}K\]
$w$ 스케일 파라미터 $x, y$ 카메라 영상의 한점(픽셀위치) $X, Y, Z$ 월드 좌표계의 한점의 좌표 $P$ 카메라 행렬
내부 파라미터 외부 파라미터 \(\begin{bmatrix} R \\ t \end{bmatrix}\) \(K = \begin{bmatrix} f_x & 0 & 0\\ s &f_y & 0\\ c_x & c_y & 1\end{bmatrix}\) $R \rightarrow$ $3\times 3$의 회전행렬
$t \rightarrow$ $1\times 3$의 평행이동 벡터$(f_x, f_y) \rightarrow$ 픽셀단위로 표현된 카메라의 초점 길이
$(c_x, c_y) \rightarrow$ 카메라 영상의 중심좌표
$s = f_x tan(\alpha) \rightarrow$ skew계수4. 방법
체커보드 촬영 $\rightarrow$ 코너점 검출 $\rightarrow$ 내부 파라미터 및 외부파라미터 계산
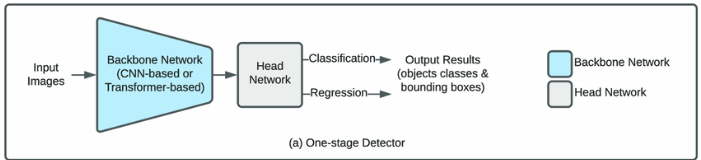
3) 검출
Detection
- One Stage Detector
- Classification과 Regional Proposal을 동시에 수행하는 방법.
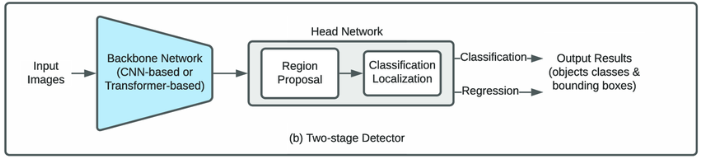
- Two-stage Detector
- Classification과 Regional Proposal을 순차적으로 수행하여 결과를 얻는 방법
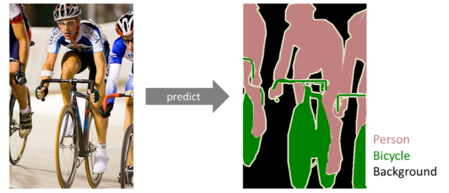
Segmentation
픽셀별로 물체와 배경을 분류하는 기술
4) Tracking
![]()
Tracking이란 검출 정보를 시간적으로 연결하여 물체별로 ID를 부여하고 추적하는 기술이다.
즉, 다음과 같이 “예측 $\rightarrow$ 연결(유사도 기반)”의 과정을 통해 이루어 진다.
예측 연결(Association) 기존 Kalman Filter - 현재 RNN과 같은 딥러닝 모델
(GNN이라는 기술도 주목받고 있음)1. Siamese Network
ⅰ. 두개의 비슷한 Network를 사용해 특징값 추출
ⅱ. 특징값 사이의 유사도(거리)를 0~1사이의 값으로 추출
2. 모든 추출 결과들에 대해 유사도를 계산
3. 헝가리안 알고리즘을 통해 연결과거에는 Kalman Filter와 같은 기술을 활용하여 이를 수행했지만,
최근에는 딥러닝의 부상으로 GNN이라는 기술이 주목받고 있다.
2. 레이더
1) 종류
| 구분 방식 | 주파수 대역 | 송신 방식 |
|---|---|---|
| 종류 | ⅰ. 24GHz: 근거리용 레이더(SRR) ⅱ. 77GHz: 원거리용 레이더(LRR) | ⅰ. 펄스 레이더 ⅱ. 연속파 레이더 |
펄스 레이더
- 정의
- 1nm의 짧은 펄스를 송신 및 전파지연시간 측정하는 방식
검출 과정
ⅰ. 주기적으로 펄스를 반송파에 실어 물체 방향으로 송신
ⅱ. 수신시 지연시간 측정
ⅲ. 상대거리 예측- 특징
ⅰ. 펄스의 간격 $\downarrow$ = 거리분해능 $\uparrow$
ⅱ. 같은 펄스를 사용해야 하기 때문에 하나의 안테나만 사용(송수전환기)
$\rightarrow$ 다음 펄스의 송신 전에 반드시 반사펄스가 들어와야 함연속파 레이더
- 정의
- 시간에 따라 주파수가 변하는 신호를 휴지시간 없이 송신 및 전파지연시간 측정
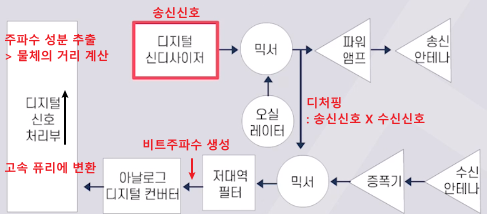
FMCW레이더(주파수 변조 연속파) 구조
믹서: 디처핑을 통해 두 신호의 주파수합-차를 주파수로 갖는 각각의 신호를 발생시킴- 특징
ⅰ. 송수신 안테나가 분리
ⅱ. 비트 주파수를 사용해 샘필링시 하드웨어 비용이 절감됨
2) 물체 검출

검출 과정
- “시간-주파수” 형태의 신호 획득
- 수신 신호에 시간에 따라 이동하는 윈도우를 적용해 주파수 성분 변환을 수행한다.
“거리-도플러” 영역으로 환산
각 셀에서 신호의 세기를 Threshold를 기준으로 나눔
ⅰ. Threshold $\downarrow$: 물체가 아님에도 물체라고 검출할 확률 상승
ⅱ. Threshold $\uparrow$: 물체가 있음에도 검출하지 못할 확률 상승
- 에너지 관찰
- 하나의 셀에 대해 에너지를 보면 물체까지의 거리와 상대속도를 알 수 있다.
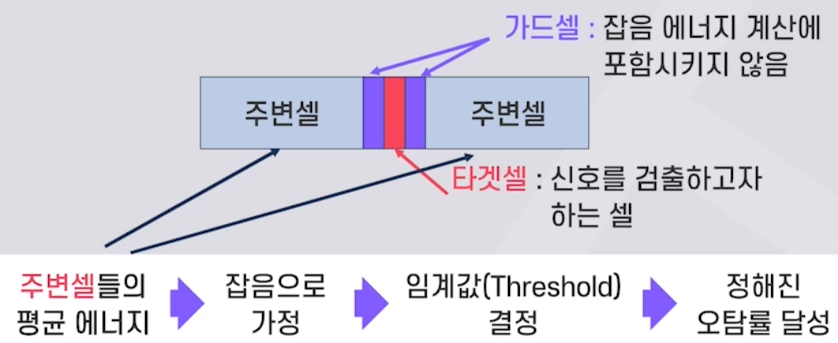
CFAR(Constant False Alarm Rate)검출기
위의 검출과정에서 보면 알 수 있듯이 일정한 Threshold를 통해 검출을 할 경우
잡음이나 클러터와 같은 방해신호 때문에 일정한 오탐률을 보장할 수 없다.
(클러터: 잘못 반사된 신호에 의해 물체가 없는 위치에 신호가 검출되는 것)즉, 이 Threshold를 적응적으로 조절하는 것이 필요하다
- 셀-평균 CFAR검출
- 검출하고자하는 셀의 주변 셀의 정보를 이용해 잡음을 계산한다.
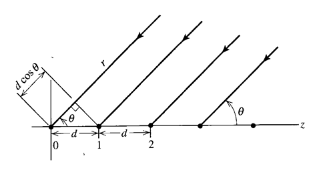
횡방향 각도 검출
1개의 RADAR는 횡방향에 존재하는 물체에 대한 검출 성능이 떨어진다.
이는 배열안테나를 활용해 수신된 내용의 위상 차이를 이용하면 검출할 수 있다..
3) 연구 방향
기존의 레이더는 횡방향 해상도가 낮고, 클러터 현상으로 인해 오탐률이 높다는 단점을 가졌다.
최근에는 이를 개선하는 식으로 연구가 진행되고 있고, 대표적인 방법이 다음과 같다.
연구 특징 고해상도 레이더 1. MIMO안테나
: 많은 수의 배열 안테나를 사용해 해상도를 증가시키고 3차원 데이터를 얻는 방법
2. 4D이미지 레이더
: 4차원 정보(x, y, z, 속도)를 Point Cloud형태로 제공하는 기술
딥러닝 1. 저해상도 레이더의 경우
ⅰ. 신호에 대해 슬라이딩 윈도우를 적용해 2차원 거리-도플러 영상 획득
ⅱ. 거리-도플러 영상에서 딥러닝을 적용해 조감도 영역에서 2차원 물체 검출
2. 고해상도 레이더의 경우 (라이다의 3차원물체 검출방법 사용)
ⅰ. 복셀(3차원 블록) 별로 3차원 CNN을 적용해 검출
ⅱ. 포인트 데이터를 조감도 영역에 투영해 2차원 CNN을 적용해 검출
ⅲ. 포인트 넷이라고 하는 포인트 클라우드를 직접 처리하는 방법 사용
센서 융합 1. 카메라에 레이더 정보를 추가하는 방법
2. 카메라와 레이더에서 각각 Feature Map을 추출하여 결합하고
이를 다시 딥러닝을 통해 물체를 검출하는 방법
3. 라이다
기존의 라이다는 905nm의 파장을 사용하였지만, 이 파장은 습도에 영향을 많이 받는다는 단점이 있었다.
이에 최근에는 1550nm의 파장을 사용하는 라이다를 개발하고 있다.
1) 종류
| 구분 방식 | 회전 유무 | 구현 방식 |
|---|---|---|
| 종류 | ⅰ. 회전형 라이다 ⅱ. 고정형 라이다 | ⅰ. 기계식 라이다 ⅱ. MEMS 라이다 ⅲ. 플래시 라이다 ⅳ. FMCW 라이다 |
라이다는 직진성이 강한 고출력 펄스레이저 송신하고 이를 수신하여 지연시간을 분석해 물체를 탐지하고 거리를 측정하는 장치이다.
이때, 수직방향으로 동시에 송신하는 레이저 빔의 수, 즉 채널수에 따라 Resolution이 달라진다.
(보통 4채널, 16채널, 32채널, 64채널, 128채널의 제품을 사용)1. 종류별 장단점
회전형(Mechanical) 라이다 고정형(Solid State) 라이다 탐지방법 센서를 기계적으로 회전하여 넓은 각도의 환경정보 획득 환경정보를 획득하고자 하는 각도에 설치$\cdot$운용 장점 $360^o$의 전방위 데이터 획들 가능 단순한 구성
저렴한 가격단점 복잡한 구성
비싼 가격
약한 내구성화각이 존재함 종류 기계식 라이다 MEMS 라이다
플래시 라이다
OPA 라이다2. 종류별 탐지 방법
탐지방법 기계식 라이다 기계적인 모터를 사용해 탐지
(현재 가장 많이 사용)MEMS 라이다 MEMS기술로 사용해 작은 반사거울을 제어해 탐지
(MEMS: 나노기술을 사용해 제작되는 매우 작은 기계)
$\rightarrow$ 저온에 취약플래시 라이다 송신: 단일레이저 빔을 광시야각으로 확장하여 한번에 송신
수신: 다중배열 수신 소자를 통해 반사된 레이저 빔을 수신FMCW 라이다 연속적인 신호를 보내고 분석하여 검출하는 방식(FMCW레이더와 비슷)
$\rightarrow$ 거리뿐만 아닌 속도 측정도 가능OPA 라이다 Optical Phase Array라는 배열 안테나를 사용해 기계적인 회전이 아닌
안테나 원소의 위상을 조절해 원하는 방향으로 레이저를 발사하고 수신하는 안테나
$\rightarrow$ 장거리 탐지시 고출력이 필요해 실제 자율주행에 사용하기에는 어려움
2) 검출
라이다는 고출력 펄스레이저로 인식하기 때문에 먼 거리의 물체도 정확히 감지가 가능하고 정확도도 매우 높다
이때, 인식 결과는 4차원 포인트 클라우드이다.
$\rightarrow$ (x, y, z, intensity)이를 표현하는 방식은 다음과 같다.
- 3차원 박스 표현 + 박스의 회전 각도
- 2차원 조감도(Bird Eye View)에서 박스 표현 + 박스의 회전 각도
검출 과정
라이다의 검출 결과는 순서를 갖지 않는 포인트들의 집합으로, 기존의 2차원 배열을 처리하던 CNN을 사용하기에는 적합하지 않다.
따라서 포인트 클라우드 데이터 $\rightarrow$ 특징값 추출 $\rightarrow$ 물체검출의 과정을 통해 물체를 찾게된다.
방법 설명 사례 2차원 평면 투영 포인트들을 2차원 평면에 Projection을 해 2차원 데이터를 만든다.
$\rightarrow$ 양자화(Quantization)으로 인한 성능 저하 때문에 거의 사용 X- 복셀 기반 처리 포인트들을 복셀(작은 3차원 큐브)로 나눔
$\rightarrow$ 각 복셀별로 포인트들을 인코딩해(ex. 포인트넷) 인베딩 벡터 생성세컨드
포인트 필라
PV-RCNN포인트 넷 전체의 포인트 클라우드 집합에 포인트넷 적용
$\rightarrow$ 배경과 물체의 포인트를 분리
$\rightarrow$ 물체에 포인트를 뽑아 특징값을 계산포인트 RCNN
PV-RCNN(PV-RCNN은 복셀기반 방법과 포인트넷의 혼합방법이다.)
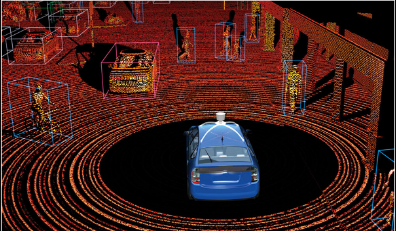
3) Tracking
![]()
Tracking이란 검출 정보를 시간적으로 연결하여 물체별로 ID를 부여하고 추적하는 기술이다.
즉, 다음과 같이 “3차원 박스 새로 검출 $\rightarrow$ 기존의 박스와 연결” 과정을 통해 이루어 진다.
순서 예측 박스 검출 Kalman Filter
(최근에는 딥러닝의 부상으로 GNN이라는 기술이 주목받고 있다.)특징값 추출
(딥러닝)포인트넷을 사용해 특징값 추출
$\rightarrow$ 정보의 손실없이 모든 포인트로부터 특징값 추출 가능유사도 측정
(딥러닝)Siamese Network를 사용해 유사도 계산
ⅰ. 두개의 비슷한 Network를 사용해 특징값 추출
ⅱ. 특징값 사이의 유사도(거리)를 0~1사이의 값으로 추출
ⅲ. 모든 추출 결과들에 대해 유사도를 계산
ⅳ. 헝가리안 알고리즘(또는 GNN)을 통해 연결예시: mmMOT, GNN3DMOT