6. Object Detection(One-Stage)
Object Detection
1. One-Stage Detection Model
1) YOLO
Purpose
- 앞선 모델들은 ROI를 위해 Box Regression과정을 한번 더 수행했다.
$\rightarrow$ Grid Cell(논문 제목 그대로 You Only Look Once, Box Regression과정은 한번이면 족하다.) (제목부터 자극적이다…)
동작과정
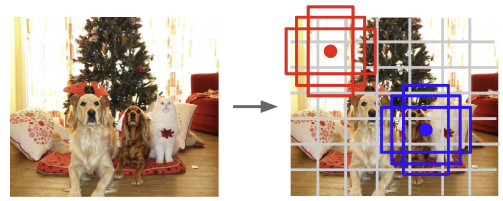
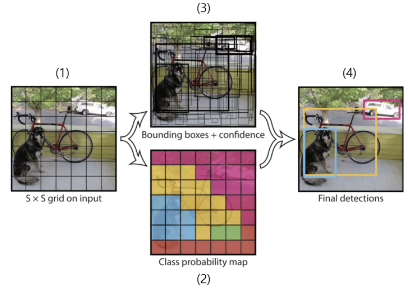
- Grid
- 이미지를 $7 \times 7$크기의 Grid로 나눈다.
- Classification
- 각 Grid에 대해 Classification을 수행한다.
(Background도 이 Class중 1개에 포함)
- Base Box 생성
- 각 Grid에 대해 “B”개의 Base Box들을 생성한다.
(이 Base Box가 Anchor Box의 역할을 함)- 각 Base Box별로 Regression을 수행한다.
Output $\rightarrow$ (x, y, h, w, Confidence)
(grid cell기준 x, grid cell기준 y, image기준 h, image기준 w, objectness)$\therefore 7 \times 7\times (5 \times B + C)$개의 Bounding Box 생성
2) DETR
Purpose
- 기존의 Anchor Box를 사용하는 방식은 다음과 같다.
Positive Sample 결정 $\rightarrow$ NMS (or other Hand Craft Post Processing) $\rightarrow$ ROI결정
즉, Ground Truth에 대해 Prediction이 Many-to-one 관계이다.
$\Rightarrow$ Anchor Box을 없애 Hand craft한 Post Processing이 없는 One-to-one model을 만듦동작과정
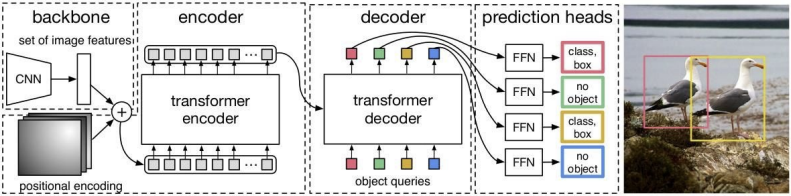
과정 1. Backbone $(C, H, W)$
$\rightarrow (D, HW)$ⅰ. Flatten
: Transformer의 Query로 주기 위한 평탄화
ⅱ. Positional Encoding
: Patch의 위치정보를 위한 Encoding2. Transformer
(Encoder)$(D, HW)$
$\rightarrow (D, HW)$Encoder는 Multi-head Self Attention을 통해
Key와 Value를 생성3. Transformer
(Decoder)$(D, HW), N$
$\rightarrow N$ⅰ. N개의 Object Query(초기값=0) 생성하고
Multi-head Self Attention
ⅱ. Encoder의 Key-Value와 함께
Multi-head Cross Attention
☆ Query는 Object Prompt & Learnable
4. Feed Foward $N \rightarrow N$ ⅰ. N개의 Query에 대해 모두 예측
(Background의 경우 예측 X)
ⅱ. Set to Set 학습을 위한
Bipartite Matching(Self Attention: Query, Key, Value가 같은 Feature Map에서 생성되는 것)
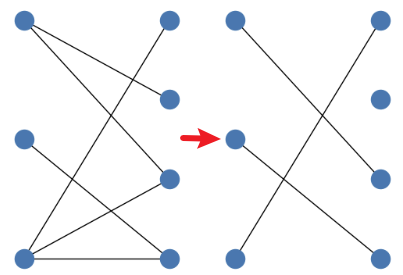
(Cross Attention: Query는 생성 Key, Value를 Encoder에서 가져오는 것)Bipartite Matching
DETR은 Output이 Parallel하게 출력된다. 즉, Box Regression결과를 한번에 알게 된다.
따라서 각 Box가 어떤 Ground Truth와 Matching되어야 하는지 알 수 없다.
이때, Brute Force하게 최적의 조건을 탐색하면 시간이 지나치게 많이 걸린다.
\[\hat{\sigma} = \text{arg}\,\min \limits_{\sigma \in \Omega_N} \sum \limits_i^N \mathcal{L}_{match}(y_i, \hat{y}_{\sigma(i)})\]
이를 위해 사용하는 것이 Bipartite Matching(이분 매칭)으로, 각 Bounding Box가 어떤 Ground Truth와 연결되어야 최적의 상태가 되는지 알아내는 알고리즘이다.\[\mathcal{L}_{match} = -\mathbb{1}_{\{c_i \neq \emptyset\}} \hat{p}_{\sigma(i)}(c_i) + \mathbb{1}_{\{c_i \neq \emptyset\}} \mathcal{L}_{box}(b_i, \hat{b}_{\sigma(i)})\]
- 최적의 쌍($\hat{\sigma}$)은 두 노드를 잇는 연결선 중($\sigma \in \Omega_N$) 유사도($\mathcal{L}_{match}$)를 최소화 하는 쌍
\(\mathcal{L}_{Hungarian}(y, \hat{y}) = \sum \limits_{i=1}^N [-log(\hat{p}_{\hat{\sigma}(i)}(c_i)) + \mathbb{1}_{\{c_i \neq \emptyset\}} \mathcal{L}_{box}(b_i, \hat{b}_{\hat{\sigma}}(i))]\)
.png)
.png)
.png)
.png)
– todo: SSD, RetinaNet, Efficient Det, M2Det, CorNerNet –