4. Control
시스템이란 다음과 같이 표현이 가능하다.
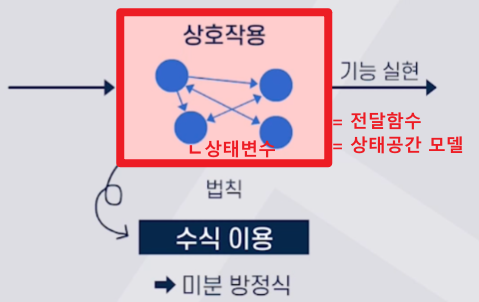
- 필요한 기능을 위해 관련 요소를 어떤 법칙에 따라 조합한 집합체
- 각 구성요소들이 상호작용(수학적 모델)하거나 상호의존해 복잡하게 얽힌 통일된 하나의 집합체
우리는 이 시스템을 모델링함으로써, 우리가 원하는 장치들을 만들 수 있다.
이때, 모델링이란 상태변수 및 전달함수를 계산해내는 것을 의미한다.
이 전달함수는 입력과 출력의 비율을 나타내는데, 전달함수는 시간영역에서 풀기에는 매우 복잡한 과정이 필요하다.
때문에 라플라스 변환을 통해 시간 영역이 아닌 주파수 영역에서 표현된다.
1. 제어기
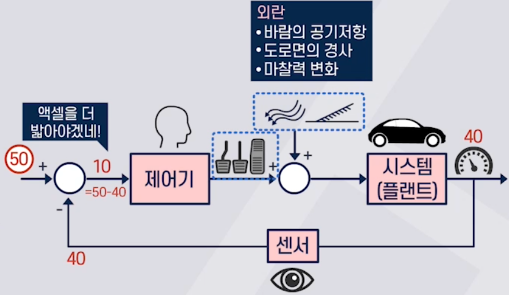
제어의 기본은 현재 상태와 목표값간의 오차를 계산하는 것부터 시작된다.
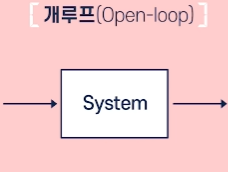
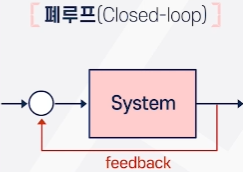
1) 제어기 종류
Open-Loop Closed-Loop Feed Back X O 특징 시스템(플랜트)의 정확한 정보를 알지 못해도
목표값에 도달 가능예시 신호등
선풍기난방시스템
속력유지시스템
2) 제어 개발 방법
SILS Software In the Loop Simulation
: Software와 Simulation을 이용해 평가와 개발하는 방법
장점
- 주행환경과 자동차 모델을 자유롭게 설정 가능
- 실제 환경에서는 측정하기 힘든 물리값을 수학적 모델을 기반으로 탐색
- 컴퓨터 그래픽을 통한 이해 가능HILS Hardware In the Loop Simulation
: Hardware와 Simulation을 이용해 평가와 개발하는 방법
장점
- 수학적인 모델링이 어려운 부품/시스템 테스트 가능
- 부품에 대해 하나 하나 성능 시험 가능
- 품질 향상 및 비용절감 가능
(EX. ECU HILS, ECU&Camera HILS)VILS Vehicle In the Loop Simulation
: 실제 도로주행을 통한 검증 전 최종단계
: 실제주행은 아니지만 실제 차와 가상환경을 연결해 테스트하는 방식
장점
- 가상주행의 장점과 실제주행의 장점 결합 가능※ ECU(Electronic Control Unit): 차량 내 각종 전자 제품을 제어하는 장치
2. 시스템 모델링
1) 요소
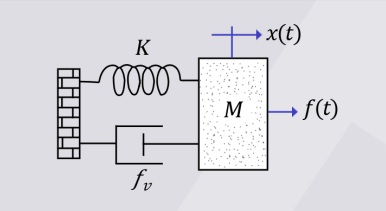
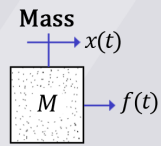
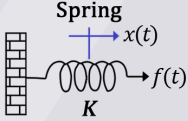
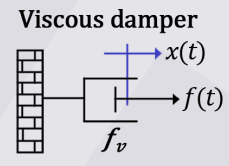
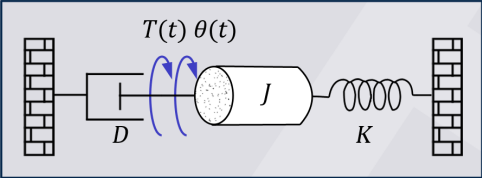
질량 스피링 댐퍼
(진동 억제)병진운동
$F=ma$
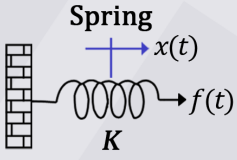
$F=kx$
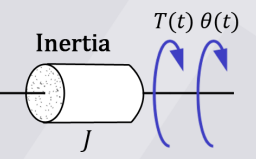
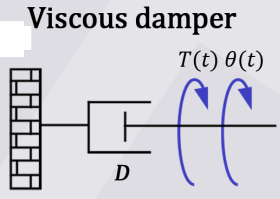
$F=f_vV$회전운동
$T=J\theta$
T: 관성모멘트
J: 각속도
$\theta$: 토크
$F=k\theta$
F: 토크
k: 스프링상수
$\theta$: 위치
$F=D\theta$
F: 토크
D: 댐퍼상수
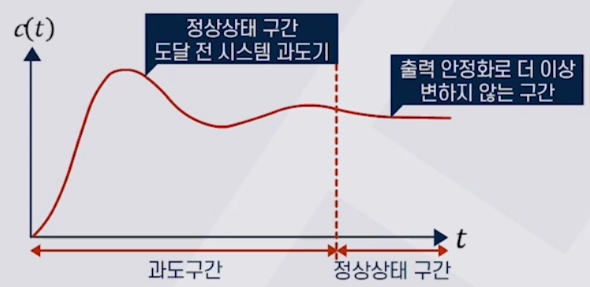
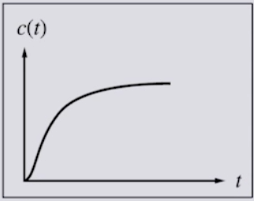
$\theta$: 각속도시간응답 특성
- 과도구간
- 정상상태구간
- 정착시간(Settling Time)
$\quad$ 과도구간 $\overset{time}{\Leftrightarrow}$ 정상상태구간 (95%)
- 상승시간(Rise Time)
$\quad$ 초기값+10% $\overset{time}{\Leftrightarrow}$ 목표치의 90%
- 피크시간(Peak Time)
$\quad$ 초기값 $\overset{time}{\Leftrightarrow}$ 최대 출력
- 퍼센트 오버슈트
$\quad$: 목표치와 최대치 사이의 비율
- 정상상태 오차
$\quad$: 정상상태에서의 입력값과의 차이
2) 시스템의 종류
| System | 1. Undampted | 2. Underdamped | 3. Critically damped | 4. Overdamped |
|---|---|---|---|---|
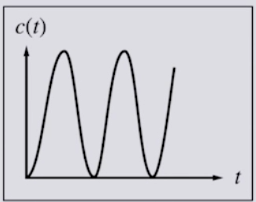 | 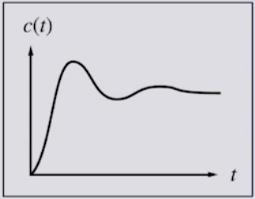 | 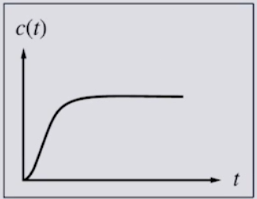 |  | |
| 감쇄 | X | O | (특정조건 만족) | $\Uparrow$ |
- 안정한 시스템: 출력이 발산하지 않는 것
- 안정한 시스템의 응답 = 영상태응답 + 영입력 응답
- 영상태 응답: 입력에 의한 응답, 초기조건은 0
- 영입력 응답: 초기 조건(입력이 없을 때)에 의한 응답
이는 전달함수 관점에서도 해석이 가능하다.
- 안정한 시스템
: 전달함수의 극점(상태공간 모델에서 시스템 행렬의 고유값)이 모두 좌반면에 위치할 때
(우반면의 극점은 라플라스 변환 시 발산하기 때문)(극점: 전달함수의 분모를 0으로 만드는 부분) (영점: 전달함수의 분자를 0으로 만드는 부분) (좌반면: 허수축을 기준으로 왼쪽에 존재하는 공간, 즉 실수부분이 모두 음수) (우반면: 허수축을 기준으로 오른쪽에 존재하는 공간)
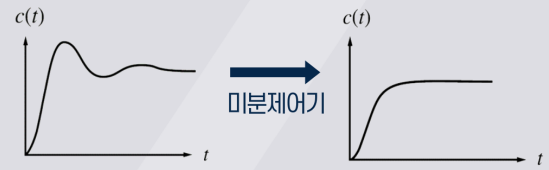
3) PID 제어기
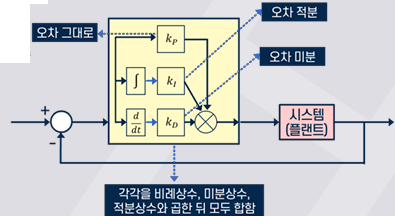
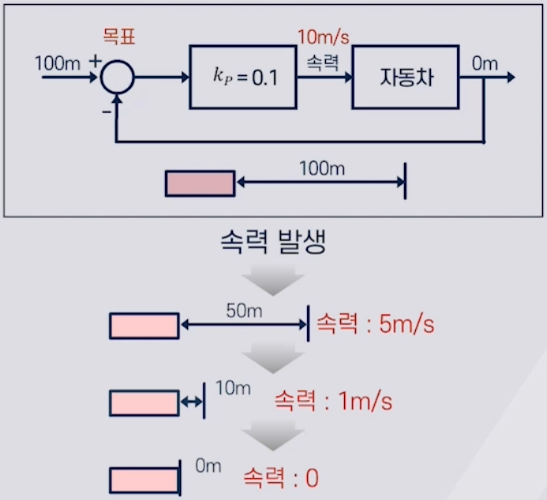
비례제어기 적분 제어기 미분 제어기 그림 특징 오차와 비례상수를 이용해
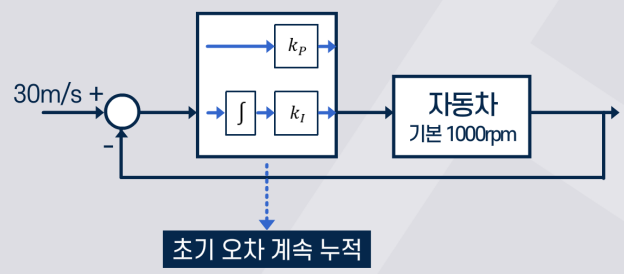
목표값에 도달하게 함정상상태 오차를 줄이기 위해 사용
(오차를 누적 계산)Overshoot를 방지하기 위해 사용
(시간에 따른 오차의 변화를 계산)단점 정상상태 오차 발생 적분 상수가 클때 OverShoot 발생
3. 차량 구조
1) 차체
자동차의 겉부분, 사람과 화물을 싵는 부분으로 외부 충격 및 진동을 견디는 역할을 한다.
서스펜션(현가시스템)
서스펜션은 차체와 차축사이에 설치된 완충장치로 충격이나 흔들림을 방지한다.
뿐만 아니라 바퀴와 지면의 접지력을 상승시켜 안정성을 확보해주는 역할을 한다.
차축식 독립식 특징 차축과 현가장치가 직접 연결됨 차축과 현가장치의 구별이 명확하지 않음
(롤링 현상을 억제하기 위한 스테빌라이저가 존재)장점 ⅰ. 구조가 간단하고 튼튼함
ⅱ. 저렴한 비용
ⅲ. 큰 힘을 내기 쉬움ⅰ. 차량의 높이를 낮출 수 있음
ⅱ. 스프링과 연결된 부분이 가벼움
ⅲ. 좋은 승차감단점 ⅰ. 스프링과 연결된 부분이 무거워짐
ⅱ. 바퀴 전체가 연결되어 진동이 많음
$\quad$(승차감 $\downarrow$)ⅰ. 구조가 복잡해 정비가 어려움
ⅱ. 비싼 가격
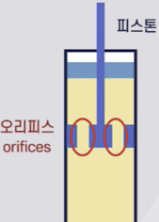
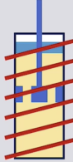
ⅲ. 바퀴의 정렬이 틀어지기 쉬움전자식 현가장치(ECS)
구성요소 댐퍼(쇼바) 스프링 특징 오리피스의 구멍의 크기를 조절해 승차감 조절
$\rightarrow$ 구멍의 크기 $\propto$ 승차감쇼바의 피스톤을 원상복구 하여
차의 높이를 유지함현가장치의 역할
- 안티롤링 제어: 선회시 발생하는 기울어짐 현상을 방지
- 안티스쿼트 제어: 가속시 발생하는 노즈업 현상 방지
- 안티다이브 제어: 급정거시 발생하는 노즈다운 현상 방지
- 안티피칭 제어: 고속방지턱이나 요철등에서 발생하는 피칭현상 방지
- 안티바운싱 제어: 위아래 흔들림을 완화
.png)
.png)
2) 차대(샤시)
자동차가 주행을 할 수 있게 하는 장치로 엔진, 동력장치, 조향장치, 브레이크이 있다.
특징 구성요소 엔진
흡입$\rightarrow$ 압축$\rightarrow$ 팽창$\rightarrow$ 배기
자동차를 주행시키기 위해 동력을 만드는 장치
ECU에 의해 제어됨
(ECU = Engine Control Unit)종방향 ADAS
ⅰ. 상위제어기
$\quad$: 목표 속력을 위한 가속력 계산
ⅱ. 하위제어기
$\quad$: 차량이 목표 가속력 값을 갖도록 제어하는 것
(예시)
$\quad$- AEB(자동 긴급 제동)
$\quad\;\;$: 소리(TTC2~1.7), 진동(TTC~1.0), 안전벨트(TTC~0)
$\quad\;\;$(TTC: Time to Collision)
$\quad$- Cruise Control(순향제어)
$\quad\;\;$: 피드백 시스템을 통해 속력 조절
$\quad\;\;$ (브레이크 사용 X)
$\quad$- Smart Cruise Control
$\quad\;\;$: 속력조절 + 안전거리 유지파워트레인 (==동력 전달 장치)
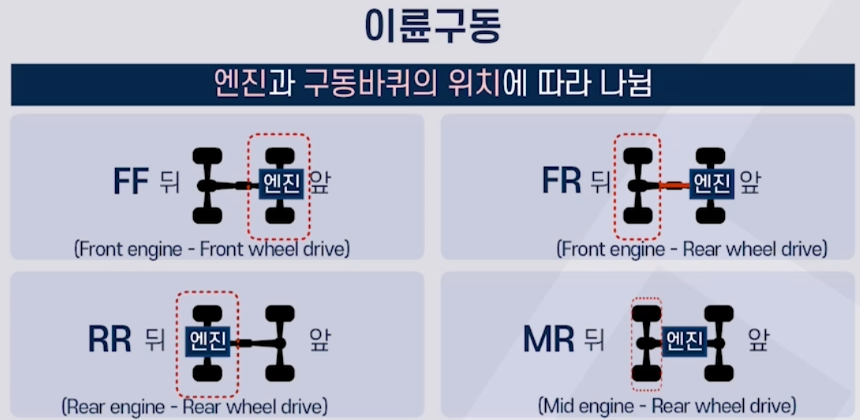
엔진에서 발생한 동력을 바퀴까지 전달하는 장치이륜구동: 구동하는 바퀴 수 2개
사륜구동: 구동하는 바퀴 수 4개
- 수동 변속기: 클러치를 통해 속도 변경
- 자동 변속기: TCU를 통해 속도 변경
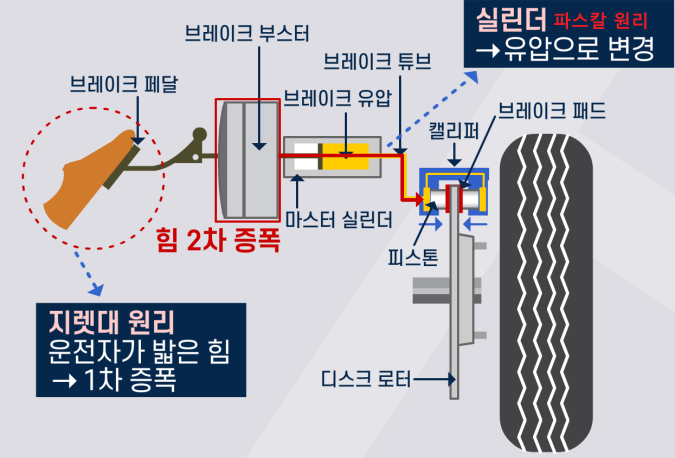
(TCU = Transmition Control Unit)제동시스템
상용브레이크, 보조브레이크, 파킹브레이크
마찰력, 파스칼의 원리를 이용해 차를 멈추는 장치ⅰ. 유압식 브레이크
$\quad$- 파스칼의 원리로 동작
ⅱ. 전자식 브레이크
$\quad$- ABS(Anti-lock Brake System)
$\quad\;\;$: brake 반복 작동으로 최대정지마찰력 확보
$\quad$- TCS(Traction Control System)
$\quad\;\;$: 엔진조절/브레이크로 공회전하는 바퀴 제어
$\quad$- ESC(Electronic Stability Control)
$\quad\;\;$: ABS와 TCS의 모든 기능을 통합한 장치
ⅲ. Brake By Wire
$\quad$- 전기유압식(EHB), Wet type
$\quad\;\;$: 센서 $\overset{전기}{\Leftrightarrow}$ ECU $\overset{전기}{\Leftrightarrow}$ 모터 $\overset{유압}{\Leftrightarrow}$ Brake
$\quad$- 전기기계식(EMB), Dry type
$\quad\;\;$: 센서 $\overset{전기}{\Leftrightarrow}$ ECU $\overset{전기}{\Leftrightarrow}$ 모터 $\overset{전기}{\Leftrightarrow}$ Brake
$\quad$- Hybrid EMB
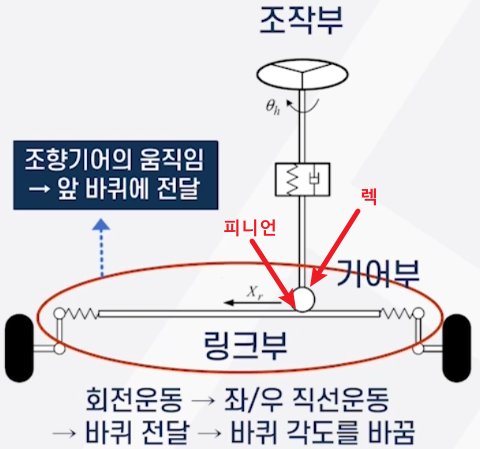
$\quad\;\;$: 앞바퀴(EHB), 뒷바퀴(EMB)조향시스템
수동 조향장치, 동력 조향장치(파워스티어링, EPS)
※ 조향비
: 앞바퀴가 1도 회전할 때 필요한 운전대의 회전 각도
(보통 운전대의 톱니 개수를 더 작게 만든다.)
소형차(14~18), 중형차(18~22), 대형차(20~26)
※ 가변조향비
: 차의 속도/핸들 각도에 따라 다른 조향비를 갖는 것
(주행 안전성을 위해 반드시 필요하다.)
(속도 $\propto$ 조향비 $\propto \frac{1}{바퀴 움직임}$)ⅰ. 유압식 파워 스티어링(HPS)
ⅱ. 전자식 파워 스티어링(EPS)
$\quad$- R-EPS
$\quad\;\;$: Rack $\overset{힘을가함}{\rightarrow}$ 큰 출력 $\rightarrow$ 중형차 이상
$\quad$- C-EPS
$\quad\;\;$: Column $\overset{힘을가함}{\rightarrow}$ 작은 출력 $\rightarrow$ 중형차 이하
$\quad$- P-EPS
$\quad\;\;$: Pinion $\overset{힘을가함}{\rightarrow}$ 작은 출력 $\rightarrow$ 중형차 이하
※ EPS 보조 토크
- 보조제어: 차의속도/입력토크에 따라 보상
- 마찰보상제어: 모터와 감속기 사이의 마찰을 보상
- 댐핑보상제어: 핸들의 회전 반대방향의 보조토크
- 관성보상제어: 핸들의 정지관성을 보상
- 복원제어: 핸들의 회전 후 복구를 보존
————————-
횡방향 ADAS
ⅰ. 상위제어기
$\quad$: 경로계획에 따른 목표 조향각을 계산
ⅱ. 하위제어기
$\quad$: 차량이 목표 조향각을 갖도록 제어하는 것

이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.