4. CSP
Constraint Satisfaction Problem
1. Background
1) 목표
Domain Specific한 Heuristic Function이 아닌 General 한 Heuristic Function으로 문제를 해결하는 것
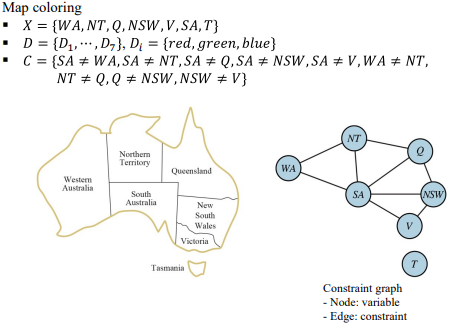
2) 구성요소
$\mathcal{X}$ 변수 $\begin{Bmatrix}X_1 & X_2 & … & X_n \end{Bmatrix}$ $\mathcal{D}$ Domain
변수마다 각각의 Domain이 존재함$\begin{Bmatrix}D_1 & D_2 & … & D_n \end{Bmatrix}$ $\mathcal{C}$ 변수들이 갖는 Constraint
ⅰ. unary Constraint: 변수가 1개인 constraint
ⅱ. Binary Constraint: 변수가 2개인 Constraint<범위, 관계>의 형태
ex. $\langle(X_1, X_2), \begin{Bmatrix}(3, 1), (3, 2), (2, 1) \end{Bmatrix} \rangle$
$\langle(X_1, X_2), X_1 > X_2 \rangle$
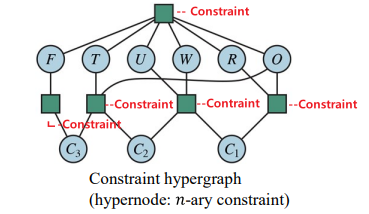
3) Constraint hypergraph
1. 이와 같은 문제가 있다.
이 문제는 다음과 같이 표현할 수 있다.
$alldiff(T, W, O, F, U, R)$
$\langle O+O = R+10\cdot C_1 \rangle$
$\langle C_1 + W + W = U + 10 \cdot C_2 \rangle$
$\langle C_2 + T + T = O + 10 \cdot C_3 \rangle$
$\langle C_3 = F \rangle$
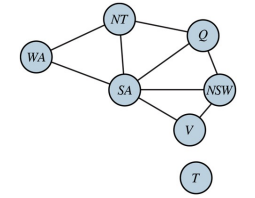
$F \neq 0$2. 이 문제는 다시 Constraint Graph로 그릴 수 있다.

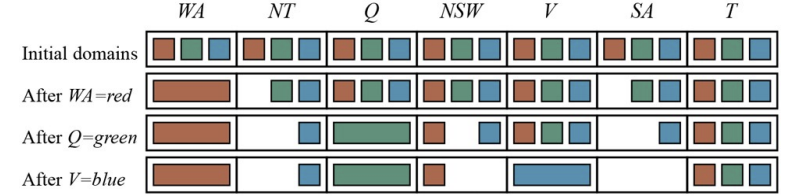
2. Constraint Propagation
위와 같이 문제를 모델링한 후에, 변수 하나에 임의의 값을 설정해보자.
그러면 Constraint에 의해 다른 변수들이 가질 수 있는 값에 영향이 간다.
이때, 이 영향은 Constraint에 직접적으로 참여하는 변수 뿐만 아니라 간접적으로 참여하는 변수도 포함이다. 이를 Constraint Propagation이라 한다.
1) Arc Consistency Enforcing
- Arc consistent
- Consistent Propagation을 위해서는 변수 $X$의 정의역의 모든값이 이 Constraint에 참여하게 해야한다. 이를 Arc consistent한 상태라고 정의한다.
(Domain에서 필요없는 Value가 없는 상태)
Algorithm
Arc Consistency를 만드는 알고리즘 중에서 AC-3라는 알고리즘이 있다.
이 알고리즘은 구현하기 쉽지만 다음과 같은 단점이 있다.
- Binary Constraint에 최적화 되어 있음
- 제약조건을 여러번 반복 점검하게 됨
- $cd^3$의 Time Complexity
$c$: len(constraint)
$d$: len(domain)
K-Consistency
K Consistency (K=1)
Node Consistency어떤 변수가 자신에 속한 모든 Domain을 가질 수 있을 때 (K=2)
Arc Consistency두 변수에 대해서 일관성이 존재할 때 $\begin{Bmatrix}X_i, X_j\end{Bmatrix} x_i \leftrightarrow x_j$ (K=3)
Path Consistency세 변수에 대해서 일관성이 존재할 때
(3변수가 각각 다른 변수에 대해 Binary Constraint 존재)$\begin{Bmatrix}X_i, X_j\end{Bmatrix} \qquad \; x_j$
$\begin{Bmatrix}X_j, X_k\end{Bmatrix} \quad \swarrow \;\uparrow$
$\begin{Bmatrix}X_k, X_j\end{Bmatrix} xi \rightarrow x_k$(Strong)
K Consitency$(K=1, K=2, … , K=k)$를 모두 만족할 때
Strong K Consistency문제의 시간복잡도 = $O(n^2d)$
그러나 Strong K Consistency로 만드는 게 NP-Complete이다.
2) Backtracking Search
![]()
함수 방법1 방법2 SELECT_VARIABLE - MRV(Minimum Remaining Value)
: 가장 제약된 변수,
실패할 가능성이 제일 큰 변수를 선택- Degree Heuristic
: 변수가 관여하는 제약의 개수가
많은것부터 선택하는 방식
(주로 처음 시작할 때 사용)SELECT_DOMAIN - Least Constraining Value
: 변수에 값 $x$를 대입했을 때,
다음Node들의 선택권이 많아지도록 선택IFERENCE
(실패가능성파악)- Foward Checking
: 값을 할당한 후에, 나머지의 Domain 수정
Domain에 남은값이 없으면 삭제 후 재할당- MAC(Maintain Arc Consistency)
:값을 할당한 후 AC-3를 통해
Arc Consistency확인
(실패 가능성 미리 확인)Back Tracking - Back Jumping
: 원인이 되는 부분까지 Jump
(Q=빨, NSW=초, V=파, T=빨, SW=?
T가 아닌 V가 문제임 $\rightarrow$ T를 건너뜀)- Conflict-directed backjumping
: 원인이 되는 부분이 복합적일 때
(WA=빨, NSW=빨, T=빨, 나머지=?
T가 아니라 WA와 NSW가 문제임)

이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.